Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1142 results for "Bin-Tzong Chi" clear search
HeatSupply
Jonathan Busch | Published Tuesday, May 17, 2016 | Last modified Tuesday, March 15, 2022HeatSupply models the development of district heat networks in cities by three types of instigators: Local Authorities, Commercial developers and Community organisations.
Can ethnic tolerance curb self-reinforcing school segregation? A theoretical Agent Based Model
Lucas Sage Andreas Flache | Published Monday, August 10, 2020Schelling and Sakoda prominently proposed computational models suggesting that strong ethnic residential segregation can be the unintended outcome of a self-reinforcing dynamic driven by choices of individuals with rather tolerant ethnic preferences. There are only few attempts to apply this view to school choice, another important arena in which ethnic segregation occurs. In the current paper, we explore with an agent-based theoretical model similar to those proposed for residential segregation, how ethnic tolerance among parents can affect the level of school segregation. More specifically, we ask whether and under which conditions school segregation could be reduced if more parents hold tolerant ethnic preferences. We move beyond earlier models of school segregation in three ways. First, we model individual school choices using a random utility discrete choice approach. Second, we vary the pattern of ethnic segregation in the residential context of school choices systematically, comparing residential maps in which segregation is unrelated to parents’ level of tolerance to residential maps reflecting their ethnic preferences. Third, we introduce heterogeneity in tolerance levels among parents belonging to the same group. Our simulation experiments suggest that ethnic school segregation can be a very robust phenomenon, occurring even when about half of the population prefers mixed to segregated schools. However, we also identify a “sweet spot” in the parameter space in which a larger proportion of tolerant parents makes the biggest difference. This is the case when parents have moderate preferences for nearby schools and there is only little residential segregation. Further experiments are presented that unravel the underlying mechanisms.
Hedonic and Eudaimonic Well-being Based Reward for Intrinsic Motivated Reinforcement Learning Agents
Yue Gao Shimon Edelman | Published Monday, March 21, 2016The code contains four experiments for well-being based IMRL reward features.
Best Practices for Civic Collaboration
Wei Zhong | Published Saturday, December 20, 2008 | Last modified Saturday, April 27, 2013This is a modified version (Netlogo 4.0.3) of the model in support of Erik Johnstons dissertation, programmed in Netlogo 3.1.4 (May 15th, 2007).
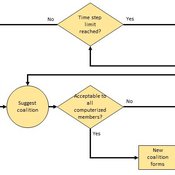
Heuristic Algorithm for Generating Strategic Coalition Structures
Andrew Collins Daniele Vernon-Bido | Published Monday, October 12, 2020The purpose of the model is to generate coalition structures of different glove games, using a specially designed algorithm. The coalition structures can be are later analyzed by comparing them to core partitions of the game used. Core partitions are coalition structures where no subset of players has an incentive to form a new coalition.
The algorithm used in this model is an advancement of the algorithm found in Collins & Frydenlund (2018). It was used used to generate the results in Vernon-Bido & Collins (2021).
Rebel Group Protection Rackets
Gerd Wagner Luis Gustavo Nardin Kamil C. Klosek Frances Duffy | Published Wednesday, December 04, 2019System Narrative
How do rebel groups control territory and engage with the local economy during civil war? Charles Tilly’s seminal War and State Making as Organized Crime (1985) posits that the process of waging war and providing governance resembles that of a protection racket, in which aspiring governing groups will extort local populations in order to gain power, and civilians or businesses will pay in order to ensure their own protection. As civil war research increasingly probes the mechanisms that fuel local disputes and the origination of violence, we develop an agent-based simulation model to explore the economic relationship of rebel groups with local populations, using extortion racket interactions to explain the dynamics of rebel fighting, their impact on the economy, and the importance of their economic base of support. This analysis provides insights for understanding the causes and byproducts of rebel competition in present-day conflicts, such as the cases of South Sudan, Afghanistan, and Somalia.
Model Description
The model defines two object types: RebelGroup and Enterprise. A RebelGroup is a group that competes for power in a system of anarchy, in which there is effectively no government control. An Enterprise is a local civilian-level actor that conducts business in this environment, whose objective is to make a profit. In this system, a RebelGroup may choose to extort money from Enterprises in order to support its fighting efforts. It can extract payments from an Enterprise, which fears for its safety if it does not pay. This adds some amount of money to the RebelGroup’s resources, and they can return to extort the same Enterprise again. The RebelGroup can also choose to loot the Enterprise instead. This results in gaining all of the Enterprise wealth, but prompts the individual Enterprise to flee, or leave the model. This reduces the available pool of Enterprises available to the RebelGroup for extortion. Following these interactions the RebelGroup can choose to AllocateWealth, or pay its rebel fighters. Depending on the value of its available resources, it can add more rebels or expel some of those which it already has, changing its size. It can also choose to expand over new territory, or effectively increase its number of potential extorting Enterprises. As a response to these dynamics, an Enterprise can choose to Report expansion to another RebelGroup, which results in fighting between the two groups. This system shows how, faced with economic choices, RebelGroups and Enterprises make decisions in war that impact conflict and violence outcomes.
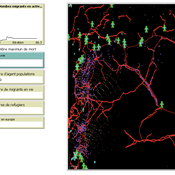
RefugeePathSIM Model
Liliana Perez Saeed Harati Guillaume Arnoux Hébert | Published Thursday, October 11, 2018 | Last modified Tuesday, October 16, 2018RefugeePathSIM is an agent-based model to simulate the movement behavior of refugees in order to identify pathways of forced migration under crisis. The model generates migrants and lets them leave conflict areas for a destination that they choose based on their characteristics and desires. RefugeePathSIM has been developed and applied in a study of the Syrian war, using monthly data in years 2011-2015.
Replication of the Demographic Prisoner's Dilemma
Wolfgang Radax | Published Thursday, May 02, 2013The provided source code is the result of our efforts in replicating Epstein’s Demographic Prisoner’s Dilemma. The simulation model is written in Repast/J 3.1.
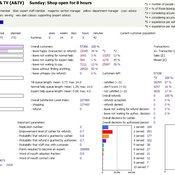
ManPraSim: A Management Practice Simulation
peer-olaf_siebers | Published Wednesday, February 23, 2011 | Last modified Saturday, April 27, 2013This simulation model is associated with the journal paper “A First Approach on Modelling Staff Proactiveness in Retail Simulation Models” to appear in the Journal of Artificial Societies and Social Simulation 14 (2) 2. The authors are Peer-Olaf Siebers (pos@cs.nott.ac.uk) and Uwe Aickelin (uxa@cs.nott.ac.uk).
An Agent-Based Model of Internet Diffusion Under General and Specific Network Externalities
Filiz Garip | Published Friday, April 27, 2012 | Last modified Saturday, April 27, 2013Using nodes from the 2002 General Social Survey sample, the code establishes a network of ties with a given homophily bias, and simulates Internet adoption rates in that network under three conditions: (i) no network externalities, (ii) general network externalities, where an individual’s reservation price is a function of the overall adoption rate in the network, (iii) specific network externalities, where reservation price is a function of the adoption rate in individual’s personal […]
Displaying 10 of 1142 results for "Bin-Tzong Chi" clear search