Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search
Classical Swine Fever in wild boars
Volker Grimm Stephanie Kramer-Schadt Cédric Scherer Martin Lange Hans-Hermann Thulke | Published Friday, September 06, 2019The model is a combination of a spatially explicit, stochastic, agent-based model for wild boars (Sus scrofa L.) and an epidemiological model for the Classical Swine Fever (CSF) virus infecting the wild boars.
The original model (Kramer-Schadt et al. 2009) was used to assess intrinsic (system immanent host-pathogen interaction and host life-history) and extrinsic (spatial extent and density) factors contributing to the long-term persistence of the disease and has further been used to assess the effects of intrinsic dynamics (Lange et al. 2012a) and indirect transmission (Lange et al. 2016) on the disease course. In an applied context, the model was used to test the efficiency of spatiotemporal vaccination regimes (Lange et al. 2012b) as well as the risk of disease spread in the country of Denmark (Alban et al. 2005).
References: See ODD model description.
Peer reviewed collective action in urban community gardens
Arthur Feinberg Paulien Herder Amineh Ghorbani Elena Hooijschuur Nicole Rogge | Published Saturday, May 15, 2021this agent-based model explores the dynamics of volunteer participation in urban community gardens, by combining behavioral theory and institutional theory
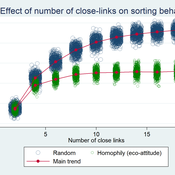
Waste separation in small-world networks
František Kalvas Michaela Kudrnáčová | Published Monday, September 30, 2019The model answers the question how homophily and number of close-links in small-world network influences behavior of consumats. The results show that the more close-links the more probable the consumat follows the major behavior, but homophilly blocks the major behavior and supports survival of the minor behavior.
Peer reviewed LUCID: Land Use Competition In Drylands
Birgit Müller Gunnar Dressler Lance Robinson | Published Wednesday, April 12, 2023The Land Use Competition in Drylands (LUCID) model is a stylized agent-based model of a smallholder farming system. Its main purpose is to illustrate how competition between pastoralism and crop cultivation can affect livelihoods of households, specifically their food security. In particular, the model analyzes whether the expansion of crop cultivation may contribute to a vicious circle where an increase in cultivated area leads to higher grazing pressure on the remaining pastureland, which in turn may cause forage shortages and livestock loss for households which are then forced to further expand their cultivated area in order to increase their food security. The model does not attempt to replicate a particular case study but to generate a general understanding of mechanisms and drivers of such vicious circles and to identify possible scenarios under which such circles may be prevented.
The model is inspired by observations of the Borana land use system in Southern Ethiopia. The climatic and ecological conditions of the Borana zone favor pastoralism, and traditionally livelihoods have been based mainly on livestock keeping. Recent years, however, have seen an advancement of crop cultivation as a coping strategy, e.g., to compensate the loss of livestock, even though crop yields are low on average and successful harvests are infrequent.
In the model, it is possible to evaluate patterns of individual (single household) as well as overall (across all households) consumption and food security, depending on a range of ecological, climatic and management parameters.
An agent-based model of scapegoating
Carlos Paes | Published Thursday, August 28, 2025 | Last modified Thursday, August 28, 2025This agent-based model investigates scapegoating as a social mechanism of crisis management. Inspired by René Girard’s mimetic theory, it simulates how individual tension accumulates and spreads across a small-world network. When tension exceeds certain thresholds, leaders emerge and accuse marginalized agents, who may attempt to transfer blame to substitutes. If scapegoating occurs, collective tension decreases, but victims become isolated while leaders consolidate temporary authority. This simulation provides a conceptual and methodological framework for exploring how collective blame, crisis contagion, and leadership paradoxes emerge in complex networks. It can also be extended with empirical data, such as social media dynamics of online harassment and virtual lynching, offering potential applications for both theoretical research and practical crisis monitoring.
Port of Mars simplified
Marco Janssen | Published Tuesday, January 14, 2020This is a simulation model to explore possible outcomes of the Port of Mars cardgame. Port of Mars is a resource allocation game examining how people navigate conflicts between individual goals and common interests relative to shared resources. The game involves five players, each of whom must decide how much of their time and effort to invest in maintaining public infrastructure and renewing shared resources and how much to expend in pursuit of their individual goals. In the game, “Upkeep” is a number that represents the physical health of the community. This number begins at 100 and goes down by twenty-five points each round, representing resource consumption and wear and tear on infrastructure. If that number reaches zero, the community collapses and everyone dies.
Agent-based Simulation of Innovation Diffusion
Theresa Elbracht | Published Monday, May 19, 2025The agent-based simulation of innovation diffusion is based on the idea of the Bass model (1969).
The adoption of an agent is driven two parameters: its innovativess p and its prospensity to conform with others. The model is designed for a computational experiment building up on the following four model variations:
(i) the agent population it fully connected and all agents share the same parameter values for p and q
(ii) the agent population it fully connected and agents are heterogeneous, i.e. individual parameter values are drawn from a normal distribution
(iii) the agents population is embeded in a social network and all agents share the same parameter values for p and q
…
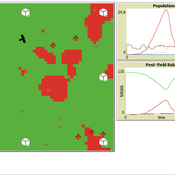
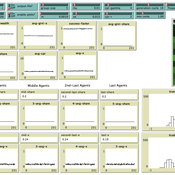
Peer reviewed Avian pest control: Yield outcome due to insectivorous birds, falconry, and integration of nest boxes.
David Jung | Published Monday, November 13, 2023 | Last modified Sunday, November 19, 2023The model aims to simulate predator-prey relationships in an agricultural setting. The focus lies on avian communities and their effect on different pest organisms (here: pest birds, rodents, and arthropod pests). Since most case studies focused on the impact on arthropod pests (AP) alone, this model attempts to include effects on yield outcome. By incorporating three treatments with different factor levels (insectivorous bird species, falconry, nest box density) an experimental setup is given that allows for further statistical analysis to identify an optimal combination of the treatments.
In light of a global decline of birds, insects, and many other groups of organisms, alternative practices of pest management are heavily needed to reduce the input of pesticides. Avian pest control therefore poses an opportunity to bridge the disconnect between humans and nature by realizing ecosystem services and emphasizing sustainable social ecological systems.
Obligation norm identification in multi-agent societies
Tony Savarimuthu | Published Tuesday, June 29, 2010 | Last modified Saturday, April 27, 2013This model describes a mechanism by which software agents can identify norms in an artificial agent society. In particular, this model uses a sequence mining approach to identify norms in an agent soc
Peer reviewed Evolution of Cooperation in Asymmetric Commons Dilemmas
Marco Janssen Nathan Rollins | Published Friday, August 20, 2010 | Last modified Saturday, April 27, 2013This model can be used to explore under which conditions agents behave as observed in field experiments on irrigation games.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search