Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search
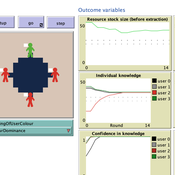
The purpose of the study is to unpack and explore a potentially beneficial role of sharing metacognitive information within a group when making repeated decisions about common pool resource (CPR) use.
We explore the explanatory power of sharing metacognition by varying (a) the individual errors in judgement (myside-bias); (b) the ways of reaching a collective judgement (metacognition-dependent), (c) individual knowledge updating (metacognition- dependent) and d) the decision making context.
The model (AgentEx-Meta) represents an extension to an existing and validated model reflecting behavioural CPR laboratory experiments (Schill, Lindahl & Crépin, 2015; Lindahl, Crépin & Schill, 2016). AgentEx-Meta allows us to systematically vary the extent to which metacognitive information is available to agents, and to explore the boundary conditions of group benefits of metacognitive information.

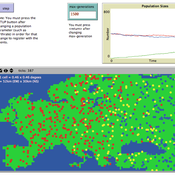
LimnoSES - social-ecological lake management undergoing regime shifts
Romina Martin | Published Thursday, November 24, 2016 | Last modified Friday, January 18, 2019LimnoSES is a coupled system dynamics, agent-based model to simulate social-ecological feedbacks in shallow lake use and management.

SMILI-T: Small-scale fisheries institutions and local interactions for transformations
Emilie Lindkvist Maja Schlüter Xavier Basurto | Published Tuesday, January 09, 2018 | Last modified Friday, March 26, 2021This model examines how financial and social top-down interventions interplay with the internal self-organizing dynamics of a fishing community. The aim is to transform from hierarchical fishbuyer-fisher relationship into fishing cooperatives.

Salzburg Bicycle model
Gudrun Wallentin | Published Saturday, October 29, 2016An ABM to simulate the spatio-temporal distribution of cyclists across the road network of the city of Salzburg.
Peer reviewed Hominin ecodynamics v.1
C Michael Barton | Published Saturday, October 01, 2011 | Last modified Friday, March 28, 2014Biobehavioral interactions between two populations under different movement strategies.

SMILI: Small-scale fisheries Institutions and Local Interactions
Emilie Lindkvist Maja Schlüter Xavier Basurto | Published Thursday, March 09, 2017The model represents an archetypical fishery in a co-evolutionary social-ecological environment, capturing different dimensions of trust between fishers and fish buyers for the establishment and persistence of self-governance arrangements.
Diffusion of Eco-Innovation through Inter-firm Network Targeting: An Agent-Based Model
apyka Flaminio Squazzoni Shyaam Ramkumar Matthias Mueller | Published Monday, January 10, 2022This model is developed as a theoretical agent-based model to study the general phenomena of network-based targeting strategies on eco-innovation adoption and diffusion through inter-firm networks.
Addressing Barriers to Primary Care Access for Latinos in the U.S.: An Agent-Based Model
S.R. Aurora (a.k.a. Mai P. Trinh) Hyunsung Oh | Published Tuesday, August 16, 2022Disparities in access to primary health care have led to health disadvantages among Latinos and other non-White racial groups. To better identify and understand which policies are most likely to improve health care for Latinos, we examined differences in access to primary care between Latinos with proficient English language skills and Latinos with limited English proficiency (LEP) and estimated the extent of access to primary care providers (PCPs) among Latinos in the U.S.
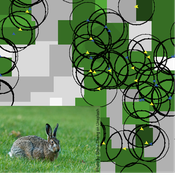
Mitigating bioenergy-driven biodiversity decline: a modelling approach with the European brown hare
Volker Grimm Maria Langhammer | Published Wednesday, November 13, 2019 | Last modified Tuesday, November 24, 2020The model is designed to analyse the effects of mitigation measures on the European brown hare (Lepus europaeus), which is directly affected by ongoing land use change and has experienced widespread decline throughout Europe since the 1960s. As an input, we use two 4×4 km large model landscapes, which were generated by a landscape generator based on real field sizes and crop proportions and differed in average field size and crop composition. The crops grown annually are evaluated in terms of forage suitability, breeding suitability and crop richness for the hare. Six mitigation scenarios are implemented, defined by a 10 % increase in: (1) mixed silphie, (2) miscanthus, (3) grass-clover ley, (4) alfalfa, (5) set-aside, and (6) general crop richness. The model shows that that both landscape configuration and composition have a significant effect on hare population development, which responds particularly strongly to compositional changes.
Interactions between organizations and social networks in common-pool resource governance
Phesi Project | Published Monday, October 29, 2012 | Last modified Saturday, April 27, 2013Explores how social networks affect implementation of institutional rules in a common pool resource.
Displaying 10 of 1221 results for "Ian M Hamilton" clear search