Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 157 results for "Andreas Ihrig" clear search
Stochastic vs. Deterministic Spatial PD
Andrew Bausch | Published Friday, November 01, 2013 | Last modified Monday, April 08, 2019This model implements a Spatial Prisoner’s Dilemma with the option to change whether agents interact deterministically or stochastically.
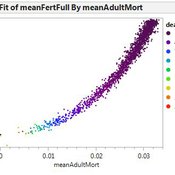
ForagerNet3_Demography_V2
Andrew White | Published Thursday, February 13, 2014ForagerNet3_Demography_V2 is a non-spatial ABM for exploring hunter-gatherer demography. This version (developed from FN3D_V1) contains code for calculating the ratio of old to young adults (the “OY ratio”) in the living and dead populations.
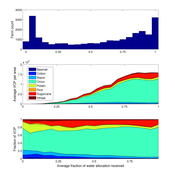
Irrigation Equity and Efficiency
Andrew Bell | Published Tuesday, August 30, 2016The purpose of this model is to examine equity and efficiency in crop production across a system of irrigated farms, as a function of maintenance costs, assessed water fees, and the capacity of farmers to trade water rights among themselves.
ForagerNet3_Demography_V3
Andrew White | Published Tuesday, November 29, 2016The ForagerNet3_Demography model is a non-spatial ABM designed to serve as a platform for exploring several aspects of hunter-gatherer demography.
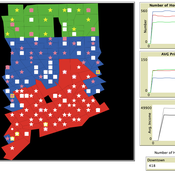
Exploring Urban Shrinkage
Andrew Crooks | Published Thursday, March 19, 2020While the world’s total urban population continues to grow, this growth is not equal. Some cities are declining, resulting in urban shrinkage which is now a global phenomenon. Many problems emerge due to urban shrinkage including population loss, economic depression, vacant properties and the contraction of housing markets. To explore this issue, this paper presents an agent-based model stylized on spatially explicit data of Detroit Tri-county area, an area witnessing urban shrinkage. Specifically, the model examines how micro-level housing trades impact urban shrinkage by capturing interactions between sellers and buyers within different sub-housing markets. The stylized model results highlight not only how we can simulate housing transactions but the aggregate market conditions relating to urban shrinkage (i.e., the contraction of housing markets). To this end, the paper demonstrates the potential of simulation to explore urban shrinkage and potentially offers a means to test polices to alleviate this issue.
Human Environment Estuarine Systems Investigator
Andrew Allison | Published Friday, February 26, 2021This model simulates the form and function of an idealised estuary with associated barrier-spit complex on the north east coast of New Zealand’s North Island (from Bream Bay to central Bay of Plenty) during the years 2010 - 2050 CE. It combines variables from social, ecological and geomorphic systems to simulate potential directions of change in shallow coastal systems in response to external forcing from land use, climate, pollution, population density, demographics, values and beliefs. The estuary is over 1000Ha, making it a large estuary according to Hume et al. (2007) - there are 12 large estuaries in the Auckland region alone (Suyadi et al., 2019). The model was developed as part of Andrew Allison’s PhD Thesis in Geography from the School of Environment and Institute of Marine Science, University of Auckland, New Zealand. The model setup allows for alteration of geomorphic, ecological and social variables to suit the specific conditions found in various estuaries along the north east coast of New Zealand’s North Island.
This model is not a predictive or forecasting model. It is designed to investigate potential directions of change in complex shallow coastal systems. This model must not be used for any purpose other than as a heuristic to facilitate researcher and stakeholder learning and for developing system understanding (as per Allison et al., 2018).
Human-in-the-loop Experiment of the Strategic Coalition Formation using the glove game
Andrew Collins | Published Monday, November 23, 2020 | Last modified Wednesday, June 22, 2022The purpose of the model is to collect information on human decision-making in the context of coalition formation games. The model uses a human-in-the-loop approach, and a single human is involved in each trial. All other agents are controlled by the ABMSCORE algorithm (Vernon-Bido and Collins 2020), which is an extension of the algorithm created by Collins and Frydenlund (2018). The glove game, a standard cooperative game, is used as the model scenario.
The intent of the game is to collection information on the human players behavior and how that compares to the computerized agents behavior. The final coalition structure of the game is compared to an ideal output (the core of the games).
Multi-Hazard Coastal Agent-Based Model (MHCABM)
Andrew Allison | Published Thursday, August 05, 2021MHCABM is an agent-based, multi-hazard risk interaction model with an integrated applied dynamic adaptive pathways planning component. It is designed to explore the impacts of climate change adaptation decisions on the form and function of a coastal human-environment system, using as a case study an idealised patch based representation of the Mount North-Omanu area of Tauranga city, New Zealand. The interacting hazards represented are erosion, inundation, groundwater intrusion driven by intermittent heavy rainfall / inundations (storm) impacts, and sea level rise.
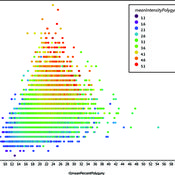
Style_Net_01
Andrew White | Published Tuesday, August 03, 2021Style_Net_01 is a spatial agent-based model designed to serve as a platform for exploring geographic patterns of tool transport and discard among seasonally mobile hunter-gatherer populations. The model has four main levels: artifact, person, group, and system. Persons make, use, and discard artifacts. Persons travel in groups within the geographic space of the model. The movements of groups represent a seasonal pattern of aggregation and dispersal, with all groups coalescing at an aggregation site during one point of the yearly cycle. The scale of group mobility is controlled by a parameter. The creation, use, and discard of artifacts is controlled by several parameters that specify how many tools each person carries in a personal inventory, how many times each tool can be used before it is discarded, and the frequency of tool usage. A lithic source (representing a geographically-specific, recognizable source of stone for tools) can be placed anywhere in the geographic space of the model.
Modelling Farmers’ Adoption Potential to New Bioenergy Crops
Andrew Crooks | Published Tuesday, November 29, 2022A model that representa farmers potential to adopt bio-fuels in Georgia
Displaying 10 of 157 results for "Andreas Ihrig" clear search