Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1292 results
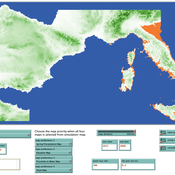
Geographic Expansion Model (GEM)
Sean Bergin | Published Friday, February 28, 2020The purpose of this model is to explore the importance of geographic factors to the settlement choices of early Neolithic agriculturalists. In the model, each agriculturalist spreads to one of the best locations within a modeler specified radius. The best location is determined by choosing either one factor such as elevation or slope; or by ranking geographic factors in order of importance.
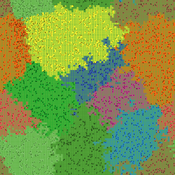
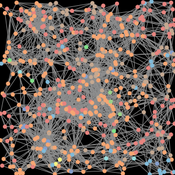
Emergence of Small-World Networks in an Overlapping-Generations Model of Social Dynamics, Trust and Economic Performance
Bogumił Kamiński Jakub Growiec Katarzyna Growiec | Published Thursday, February 27, 2020We study the impact of endogenous creation and destruction of social ties in an artificial society on aggregate outcomes such as generalized trust, willingness to cooperate, social utility and economic performance. To this end we put forward a computational multi-agent model where agents of overlapping generations interact in a dynamically evolving social network. In the model, four distinct dimensions of individuals’ social capital: degree, centrality, heterophilous and homophilous interactions, determine their generalized trust and willingness to cooperate, altogether helping them achieve certain levels of social utility (i.e., utility from social contacts) and economic performance. We find that the stationary state of the simulated social network exhibits realistic small-world topology. We also observe that societies whose social networks are relatively frequently reconfigured, display relatively higher generalized trust, willingness to cooperate, and economic performance – at the cost of lower social utility. Similar outcomes are found for societies where social tie dissolution is relatively weakly linked to family closeness.
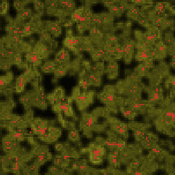
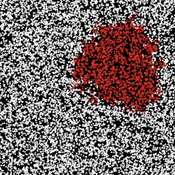
Peer reviewed Lethal Geometry
Kristin Crouse | Published Friday, February 21, 2020 | Last modified Wednesday, December 15, 2021LethalGeometry was developed to examine whether territory size influences the mortality risk for individuals within that territory. For animals who live in territoral groups and are lethally aggressive, we can expect that most aggression occurs along the periphery (or border) between two adjacent territories. For territories that are relatively large, the periphery makes up a proportionately small amount of the of the total territory size, suggesting that individuals in these territories might be less likely to die from these territorial skirmishes. LethalGeometry examines this geometric relationship between territory size and mortality risk under realistic assumptions of variable territory size and shape, variable border width, and stochastic interactions and movement.
The individuals (agents) are programmed to walk randomly about their environment, search for and eat food to obtain energy, reproduce if they can, and act aggressively toward individuals of other groups. During each simulation step, individuals analyze their environment and internal state to determine which actions to take. The actions available to individuals include moving, fighting, and giving birth.
Tram Commute
Julia Kasmire | Published Thursday, February 13, 2020 | Last modified Monday, March 02, 2020A demonstration model showing how modellers can create a multi regional tram network with commuters, destinations and houses. The model offers options to create a random tram network made from modeller input or to load shapefiles for the Greater Manchester Metrolink.
The model uses NetLogo with gis, nw an csv extensions.
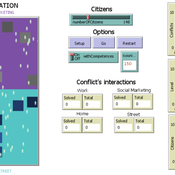
Citizenship competences and conflict resolution styles
Cecilia Avila Manuel Balaguera Valentina Tabares | Published Monday, February 03, 2020This model represents an agent-based social simulation for citizenship competences. In this model people interact by solving different conflicts and a conflict is solved or not considering two possible escenarios: when individual citizenship competences are considered and when not. In both cases the TKI conflict resolution styles are considered. Each conflict has associated a competence and the information about the conflicts and their competences is retrieved from an ontology which was developed in Protégé. To do so, a NetLogo extension was developed using the Java programming language and the JENA API (to make queries over the ontology).
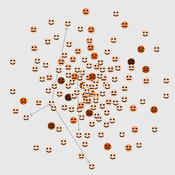
Peer reviewed Flibs'NLogo - An elementary form of evolutionary cognition
Cosimo Leuci | Published Thursday, January 30, 2020 | Last modified Monday, June 15, 2026Flibs’NLogo implements in NetLogo modelling environment, a genetic algorithm whose purpose is evolving a perfect predictor from a pool of digital creatures constituted by finite automata or flibs (finite living blobs) that are the agents of the model. The project is based on the structure described by Alexander K. Dewdney in “Exploring the field of genetic algorithms in a primordial computer sea full of flibs” from the vintage Scientific American column “Computer Recreations”.
As Dewdney summarized: “Flibs […] attempt to predict changes in their environment. In the primordial computer soup, during each generation, the best predictor crosses chromosomes with a randomly selected flib. Increasingly accurate predictors evolve until a perfect one emerges. A flib […] has a finite number of states, and for each signal it receives (a 0 or a 1) it sends a signal and enters a new state. The signal sent by a flib during each cycle of operation is its prediction of the next signal to be received from the environment”
Rangeland and evolution of management styles
Marco Janssen | Published Tuesday, January 14, 2020 | Last modified Friday, June 26, 2026Provided is a landscape of properties where pastoralists make decisions how much livestock they put on their property and how much to suppress fire from occuring. Rangelands can be grass dominated, or unproductive shrubb dominated. Overgrazing and fire suppresion lead to shrub dominated landscapes. What management strategies evolve, and how is this impacted by policies?
The model is discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/.
Governing the commons
Marco Janssen | Published Tuesday, January 14, 2020 | Last modified Friday, June 26, 2026Model on the use of shared renewable resources including impact of imitation via success-bias and altruistic punishment.
The model is discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/
Diffusion of innovations
Marco Janssen | Published Tuesday, January 14, 2020 | Last modified Saturday, June 27, 20263 simple models to illustrate diffusion of innovations.
The models are discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/
Consumats on a network
Marco Janssen | Published Tuesday, January 14, 2020 | Last modified Sunday, June 28, 2026Consumer agents make choices which products to choose using the consumat approach. In this approach agents will make choices using deliberation, repetition, imitation or social comparison dependent on the level of need satisfaction and uncertainty.
The model is discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/
Displaying 10 of 1292 results