Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1195 results for "Aad Kessler" clear search
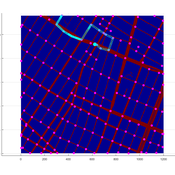
Agent-based model of WiFi tracking system in urban environment
Christopher Thron Khoi Tran | Published Friday, April 21, 2017This code simulates the WiFi user tracking system described in: Thron et al., “Design and Simulation of Sensor Networks for Tracking Wifi Users in Outdoor Urban Environments”. Testbenches used to create the figures in the paper are included.
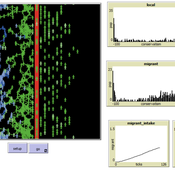
Peer reviewed MigrAgent
Wander Jager Rocco Paolillo | Published Friday, October 05, 2018 | Last modified Wednesday, November 28, 2018MigrAgent simulates migration flows of a population from a home country to a host country and mutual adaptation of a migrant and local population post-migration. Agents accept interactions in intercultural networks depending on their degree of conservatism. Conservatism is a group-level parameter normally distributed within each ethnic group. Individual conservatism changes as function of reciprocity of interaction in intergroup experiences of acceptance or rejection.
The aim of MigrAgent is to unfold different outcomes of integration, assimilation, separation and marginalization in terms of networks as effect of different degrees of conservatism in each group and speed of migration flows.
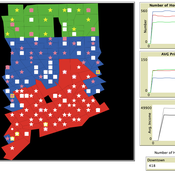
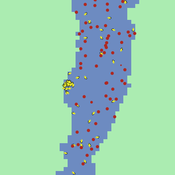
Exploring Urban Shrinkage
Andrew Crooks | Published Thursday, March 19, 2020While the world’s total urban population continues to grow, this growth is not equal. Some cities are declining, resulting in urban shrinkage which is now a global phenomenon. Many problems emerge due to urban shrinkage including population loss, economic depression, vacant properties and the contraction of housing markets. To explore this issue, this paper presents an agent-based model stylized on spatially explicit data of Detroit Tri-county area, an area witnessing urban shrinkage. Specifically, the model examines how micro-level housing trades impact urban shrinkage by capturing interactions between sellers and buyers within different sub-housing markets. The stylized model results highlight not only how we can simulate housing transactions but the aggregate market conditions relating to urban shrinkage (i.e., the contraction of housing markets). To this end, the paper demonstrates the potential of simulation to explore urban shrinkage and potentially offers a means to test polices to alleviate this issue.
COVID-19 SIR with Public Health Interventions
Kit Martin Amber Cesare Matthew Johnson | Published Tuesday, September 28, 2021This is an extension of the basic Suceptible, Infected, Recovered (SIR) model. This model explores the spread of disease in two spaces, one a treatment, and one a control. Through the modeling options, one can explore how changing assumptions about the number of susceptible people, starting number of infected people, the disease’s infection probability, and average duration impacts the outcome. In addition, this version allows users to explore how public health interventions like social distancing, masking, and isolation can affect the number of people infected. The model shows that the interactions of agents, and the interventions can drastically affect the results of the model.
We used the model in our course about COVID-19: https://www.csats.psu.edu/science-of-covid19
Peer reviewed The Viability of the Social-Ecological Agroecosystem (ViSA) Spatial Agent-based Model
Mostafa Shaaban | Published Monday, March 25, 2024ViSA 2.0.0 is an updated version of ViSA 1.0.0 aiming at integrating empirical data of a new use case that is much smaller than in the first version to include field scale analysis. Further, the code of the model is simplified to make the model easier and faster. Some features from the previous version have been removed.
It simulates decision behaviors of different stakeholders showing demands for ecosystem services (ESS) in agricultural landscape. It investigates conditions and scenarios that can increase the supply of ecosystem services while keeping the viability of the social system by suggesting different mixes of initial unit utilities and decision rules.
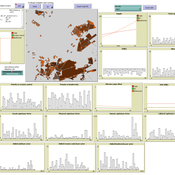
FlowLogo: An agent-based platform for simulating complex human-aquifer interactions in managed groundwater systems
Juan Castilla-Rho | Published Sunday, August 30, 2015FlowLogo integrates agent-based and groundwater flow simulation. It aims to simplify the process of developing participatory ABMs in the groundwater space and begin the exploration of novel, bottom-up solutions to conflicts in shared aquifers.
Hybrid fish-plankton model
Gudrun Wallentin Christian Neuwirth | Published Friday, October 28, 2016 | Last modified Sunday, January 29, 2017A hybrid predator-prey model of fish and plankton that switches dynamically between ABM and SD representations. It contains 6 related structural designs of the same model.
Team Cognition
Iris Lorscheid | Published Sunday, May 23, 2021The teamCognition model investigates team decision processes by using an agent-based model to conceptualize team decisions as an emergent property. It uses a mixed-method research design with a laboratory experiment providing qualitative and quantitative input for the model’s construction, as well as data for an output validation of the model. The agent-based model is used as a computational testbed to contrast several processes of team decision making, representing potential, simplified mechanisms of how a team decision emerges. The increasing overall fit of the simulation and empirical results indicates that the modeled decision processes can at least partly explain the observed team decisions.
Peer reviewed FishCensus
Miguel Pais | Published Tuesday, December 06, 2016 | Last modified Thursday, February 09, 2017The FishCensus model simulates underwater visual census methods, where a diver estimates the abundance of fish. A separate model is used to shape species behaviours and save them to a file that can be shared and used by the counting model.
Implementation of 'satisficing’ as a model for farmers’ decision-making in an agent-based model of groundwater over-exploitation
Marvin Nebel | Published Monday, May 20, 2013This model uses ’satisficing’ as a model for farmers’ decision making to learn about influences of alternative decision-making models on simulation results and to exemplify a way to transform a rather theoretical concept into a feasible decision-making model for agent-based farming models.
Displaying 10 of 1195 results for "Aad Kessler" clear search