Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 74 results design clear search
NetPlop: A moderately-featured presentation editor built in NetLogo
Patrick Steinmann | Published Saturday, March 27, 2021NetPlop is a presentation editor built entirely in NetLogo, an agent-based modelling environment. The NetPlop Editor includes a variety of tools to design slide decks, and the Viewer allows these decks to be dis-played to an enraptured audience. A key feature of NetPlop is the ability to embed agent-based models. NetPlop was developed for SIGBOVIK 2021.
CoComForest
Wuthiwong WIMOLSAKCHAROEN | Published Tuesday, February 02, 2021The name of the model, CoComForest, stands for COllaborative COMmunity FOREST management. The purposes of this model are to expose local resource harvesters to the competition with external resource harvesters, called outsiders, and to provide them the opportunity to collectively discuss on resource management. The model, which is made of a set of interconnected entities, including (i) community forest habitat, (ii) resource harvesters, (iii) market, and (iv) firebreak. More details about the CoComForest model are described based on the Overview, Design concept, and Details (ODD) protocol uploaded with the model.
VIDA: A simulation model of domestic VIolence in times of social DistAncing
Bernardo Furtado | Published Monday, January 11, 2021Violence against women occurs predominantly in the family and domestic context. The COVID-19 pandemic led Brazil to recommend and, at times, impose social distancing, with the partial closure of economic activities, schools, and restrictions on events and public services. Preliminary evidence shows that intense co- existence increases domestic violence, while social distancing measures may have prevented access to public services and networks, information, and help. We propose an agent-based model (ABM), called VIDA, to illustrate and examine multi-causal factors that influence events that generate violence. A central part of the model is the multi-causal stress indicator, created as a probability trigger of domestic violence occurring within the family environment. Two experimental design tests were performed: (a) absence or presence of the deterrence system of domestic violence against women and measures to increase social distancing. VIDA presents comparative results for metropolitan regions and neighbourhoods considered in the experiments. Results suggest that social distancing measures, particularly those encouraging staying at home, may have increased domestic violence against women by about 10%. VIDA suggests further that more populated areas have comparatively fewer cases per hundred thousand women than less populous capitals or rural areas of urban concentrations. This paper contributes to the literature by formalising, to the best of our knowledge, the first model of domestic violence through agent-based modelling, using empirical detailed socioeconomic, demographic, educational, gender, and race data at the intraurban level (census sectors).

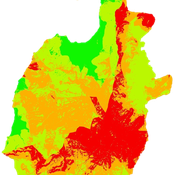
SESPES: socio-ecological systems and payment for ecosystem services model
Eulàlia Baulenas | Published Sunday, December 20, 2020 | Last modified Sunday, December 20, 2020The purpose of this spatially-explicit agent-based model is to intervene in the debate about PES policy design, implementation and context. We use the case for a woodland-for-water payment for ecosystem services (PES) and model its implementation in a local area of Catalonia (NE Spain). The model is based on three sub-models. The structural contains four different designs of a PES policy. The social sub-model includes agent-based factors, by having four types of landowner categories managing or not the forests. This sub-model is based on behavioral studies and assumptions about reception and reaction to incentive policies from European-focused studies. The ecological sub-model is based on climate change data for the area. The output are the evolution of the ecological and social goals of the policy under different policy design scenarios. Our focus in Europe surges from the general context of land abandonment that many Mediterranean areas and Eastern countries are experiencing, and the growing interest from policy-makers and practitioners on the implementation of PES schemes to ameliorate this situation.
Peer reviewed Circular Business Model experimentation: local biodigestion network
Igor Nikolic Kasper Pieter Hendrik Lange Gijsbert Korevaar Paulien Herder | Published Thursday, December 17, 2020 | Last modified Tuesday, June 29, 2021The purpose of the model is to explore the influence of the design of circular business models (CBMs) on CBM viability. The model represents an Industrial Symbiosis Network (ISN) in which a processor uses the organic waste from suppliers to produce biogas and nutrient rich digestate for local reuse. CBM viability is expressed as value captured (e.g., cash flow/tonne waste/agent) and the survival of the network over time (shown in the interface).
In the model, the value captured is calculated relative to the initial state, using incineration costs as a benchmark. Moderating variables are interactions with the waste incinerator and actor behaviour factors. Actors may leave the network when the waste supply for local production is too low, or when personal economic benefits are too low. When the processor decides to leave, the network fails. Theory of planned behaviour can be used to include agent behaviour in the simulations.

Peer reviewed Industrial Symbiosis Network implementation ABM
Igor Nikolic Kasper Pieter Hendrik Lange Gijsbert Korevaar Paulien Herder | Published Tuesday, December 01, 2020 | Last modified Wednesday, June 16, 2021The purpose of the model is to explore the influence of actor behaviour, combined with environment and business model design, on the survival rates of Industrial Symbiosis Networks (ISN), and the cash flows of the agents. We define an ISN to be robust, when it is able to run for 10 years, without falling apart due to leaving agents.
The model simulates the implementation of local waste exchange collaborations for compost production, through the ISN implementation stages of awareness, planning, negotiation, implementation, and evaluation.
One central firm plays the role of waste processor in a local composting initiative. This firm negotiates with other firms to become a supplier of their organic residual streams. The waste suppliers in the model can decide to join the initiative, or to have the waste brought to the external waste incinerator. The focal point of the model are the company-level interactions during the implementation or ending of synergies.
…
Peer reviewed Gregarious Behavior, Human Colonization and Social Differentiation Agent-Based Model
Gert Jan Hofstede Mark R Kramer Sebastian Fajardo Andrés Bernal Martijn de Vries | Published Thursday, August 20, 2020 | Last modified Thursday, October 29, 2020Studies of colonization processes in past human societies often use a standard population model in which population is represented as a single quantity. Real populations in these processes, however, are structured with internal classes or stages, and classes are sometimes created based on social differentiation. In this present work, information about the colonization of old Providence Island was used to create an agent-based model of the colonization process in a heterogeneous environment for a population with social differentiation. Agents were socially divided into two classes and modeled with dissimilar spatial clustering preferences. The model and simulations assessed the importance of gregarious behavior for colonization processes conducted in heterogeneous environments by socially-differentiated populations. Results suggest that in these conditions, the colonization process starts with an agent cluster in the largest and most suitable area. The spatial distribution of agents maintained a tendency toward randomness as simulation time increased, even when gregariousness values increased. The most conspicuous effects in agent clustering were produced by the initial conditions and behavioral adaptations that increased the agent capacity to access more resources and the likelihood of gregariousness. The approach presented here could be used to analyze past human colonization events or support long-term conceptual design of future human colonization processes with small social formations into unfamiliar and uninhabited environments.
Peer reviewed BAM: The Bottom-up Adaptive Macroeconomics Model
Alejandro Platas López Alejandro Guerra-Hernández | Published Tuesday, January 14, 2020 | Last modified Sunday, July 26, 2020Overview
Purpose
Modeling an economy with stable macro signals, that works as a benchmark for studying the effects of the agent activities, e.g. extortion, at the service of the elaboration of public policies..
…

We construct a new type of agent-based model (ABM) that can simultaneously simulate land-use changes at multiple distant places (namely TeleABM, telecoupled agent-based model). We use soybean trade between Brazil and China as an example, where Brazil is the sending system and China is the receiving system because they are the world’s largest soybean exporter and importer respectively. We select one representative county in each country to calibrate and validate the model with spatio-temporal analysis of historical land-use changes and the empirical analysis of household survey data. The whole model is programmed on RePast Simphony. The most unique features of TeleABM are that it can simulate a telecoupled system and the flows between sending and receiving systems in this telecoupled system.
Cultural Evolution of Sustainable Behaviours: Landscape of Affordances Model
Nikita Strelkovskii Roope Oskari Kaaronen | Published Wednesday, December 04, 2019 | Last modified Wednesday, December 04, 2019This NetLogo model illustrates the cultural evolution of pro-environmental behaviour patterns. It illustrates how collective behaviour patterns evolve from interactions between agents and agents (in a social network) as well as agents and the affordances (action opportunities provided by the environment) within a niche. More specifically, the cultural evolution of behaviour patterns is understood in this model as a product of:
- The landscape of affordances provided by the material environment,
- Individual learning and habituation,
- Social learning and network structure,
- Personal states (such as habits and attitudes), and
…
Displaying 10 of 74 results design clear search