Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 68 results for "Ram Babu Roy" clear search

Peer reviewed Emergent Firms Model
J M Applegate | Published Friday, July 13, 2018The Emergent Firm (EF) model is based on the premise that firms arise out of individuals choosing to work together to advantage themselves of the benefits of returns-to-scale and coordination. The Emergent Firm (EF) model is a new implementation and extension of Rob Axtell’s Endogenous Dynamics of Multi-Agent Firms model. Like the Axtell model, the EF model describes how economies, composed of firms, form and evolve out of the utility maximizing activity on the part of individual agents. The EF model includes a cash-in-advance constraint on agents changing employment, as well as a universal credit-creating lender to explore how costs and access to capital affect the emergent economy and its macroeconomic characteristics such as firm size distributions, wealth, debt, wages and productivity.
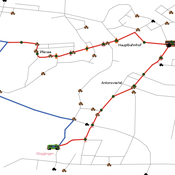
Simulating changing traffic flow caused by new bus route in Augsburg
Eduard | Published Wednesday, August 04, 2021This is a Netlogo model which simulates car and bus/tram traffic in Augsburg, specifically between the districts Stadtbergen, Göggingen and the Königsplatz. People either use their cars or public transport to travel to one of their random destinations (Stadtbergen or Göggingen), performing some activity and then returning to their home. Attributes such as travel and waiting time as well as their happiness upon arriving are stored and have an impact on individuals on whether they would consider changing their mode of transport or not.
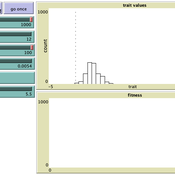
Blending vs particulate inheritance - demo of Fisher (1930)
Paul Smaldino | Published Friday, September 13, 2024A simple model illustrating RA Fisher’s (1930) reconciliation of Darwinian selection with particulate genetic contributions.

SMILI-T: Small-scale fisheries institutions and local interactions for transformations
Emilie Lindkvist Maja Schlüter Xavier Basurto | Published Tuesday, January 09, 2018 | Last modified Friday, March 26, 2021This model examines how financial and social top-down interventions interplay with the internal self-organizing dynamics of a fishing community. The aim is to transform from hierarchical fishbuyer-fisher relationship into fishing cooperatives.
SimPLS - The PLS Agent
Iris Lorscheid Sandra Schubring Matthias Meyer Christian Ringle | Published Monday, April 18, 2016 | Last modified Tuesday, May 17, 2016The simulation model SimPLS shows an application of the PLS agent concept, using SEM as empirical basis for the definition of agent architectures. The simulation model implements the PLS path model TAM about the decision of using innovative products.
Formation of Lithic Assemblages v. 1
C Michael Barton Julien Riel-Salvatore | Published Thursday, September 04, 2014This model represents technological and ecological behaviors of mobile hunter-gatherers, in a variable environment, as they produce, use, and discard chipped stone artifacts. The results can be analyzed and compared with archaeological sites.
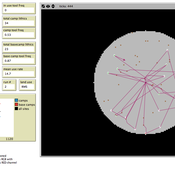
Learning Extension - RAGE RAngeland Grazing Model
Nikita Strelkovskii Cristina I. Apetrei Nikolay Khabarov Valeria Javalera Rincón | Published Saturday, July 22, 2023This is an extension of the original RAGE model (Dressler et al. 2018), where we add learning capabilities to agents, specifically learning-by-doing and social learning (two processes central to adaptive (co-)management).
The extension module is applied to smallholder farmers’ decision-making - here, a pasture (patch) is the private property of the household (agent) placed on it and there is no movement of the households. Households observe the state of the pasture and their neighrbours to make decisions on how many livestock to place on their pasture every year. Three new behavioural types are created (which cannot be combined with the original ones): E-RO (baseline behaviour), E-LBD (learning-by-doing) and E-RO-SL1 (social learning). Similarly to the original model, these three types can be compared regarding long-term social-ecological performance. In addition, a global strategy switching option (corresponding to double-loop learning) allows users to study how behavioural strategies diffuse in a heterogeneous population of learning and non-learning agents.
An important modification of the original model is that extension agents are heterogeneous in how they deal with uncertainty. This is represented by an agent property, called the r-parameter (household-risk-att in the code). The r-parameter is catch-all for various factors that form an agent’s disposition to act in a certain way, such as: uncertainty in the sensing (partial observability of the resource system), noise in the information received, or an inherent characteristic of the agent, for instance, their risk attitude.
Urban Sprawl and Income segregation with effect from income level and inequality
Nina Schwarz Cheng Guo Carsten M Buchmann | Published Tuesday, November 01, 2016 | Last modified Friday, May 26, 2017This is a stylized model based on Alonso’s model investigating the relationship between urban sprawl and income segregation.
ABM Household Decision Making on Solar Energy using Theory of Planned Behaviour
Tatiana Filatova Hannah Muelder | Published Tuesday, May 21, 2019The model aims at estimating household energy consumption and the related greenhouse gas (GHG) emissions reduction based on the behavior of the individual household under different operationalizations of the Theory of Planned Behaviour (TPB).
The original model is developed as a tool to explore households decisions regarding solar panel investments and cumulative consequences of these individual choices (i.e. diffusion of PVs, regional emissions savings, monetary savings). We extend the model to explore a methodological question regarding an interpretation of qualitative concepts from social science theories, specifically Theory of Planned Behaviour in a formal code of quantitative agent-based models (ABMs). We develop 3 versions of the model: one TPB-based ABM designed by the authors and two alternatives inspired by the TPB-ABM of Schwarz and Ernst (2009) and the TPB-ABM of Rai and Robinson (2015). The model is implemented in NetLogo.
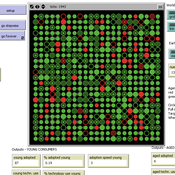
Gossip and competitive altruism support cooperation in a Public Good Game
danielevilone | Published Friday, April 16, 2021Here we share the raw results of the social experiments of the paper “Gossip and competitive altruism support cooperation in a Public Good Game” by Giardini, Vilone, Sánchez, Antonioni, under review for Philosophical Transactions B. The experiment is thoroughly described there, in the following we summarize the main features of the experimental setup. The authors are available for further clarifications if requested.
Participants were recruited from the LINEEX subjects pool (University of Valencia Experimental Economics lab). 160 participants mean age = 21.7 years; 89 female) took part in this study in return for a flat payment of 5 EUR and the opportunity to earn an additional payment ranging from 8 to 16 EUR (mean total payment = 17.5 EUR). 80 subjects, divided into 5 groups of 16, took part in the competitive treatment while other 80 subjects participated in the non-competitive treatment. Laboratory experiments were conducted at LINEEX on September 16th and 17th, 2015.
Displaying 10 of 68 results for "Ram Babu Roy" clear search