Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 60 results for "Meghan Mason" clear search
Peer reviewed Kenya ITN Agent-Based Microsimulation (2003–2024)
Wooyoung Kim Hosang Shin | Published Saturday, April 18, 2026 | Last modified Tuesday, June 16, 2026An agent-based microsimulation of insecticide-treated net (ITN) distribution and adoption in Kenya (2003–2024), integrating the Theory of Planned Behaviour, Rogers diffusion, Weibull net decay, and a GPS-based two-layer social network. 8,561 household agents calibrated via Approximate Bayesian Computation to six DHS/MIS survey waves, achieving 2.42 pp mean absolute error on Kenya-level ownership. The analysis chain supports mechanism counterfactuals and policy experiments on equity outcomes of ITN distribution strategies.
Peer reviewed ACross (Academic Collaboration, Research, Output, and System Simulation)
Wenhan Feng Bayi Li | Published Saturday, June 28, 2025The primary purpose of this model is to explain the dynamic processes within university-centered collaboration networks, with a particular focus on the complex transformation of academic knowledge into practical projects. Based on investigations of actual research projects and a thorough literature review, the model integrates multiple drivers and influencing factors to explore how these factors affect the formation and evolution of collaboration networks under different parameter scenarios. The model places special emphasis on the impact of disciplinary attributes, knowledge exchange, and interdisciplinary collaboration on the dynamics of collaboration networks, as well as the complex mechanisms of network structure, system efficiency, and interdisciplinary interactions during project formation.
Specifically, the model aims to:
- Simulate how university research departments drive the formation of research projects through knowledge creation.
- Investigate how the dynamics of collaboration networks influence the transformation of innovative hypotheses into matured projects.
- Examine the critical roles of knowledge exchange and interdisciplinary collaboration in knowledge production and project formation.
- Provide both quantitative and qualitative insights into the interactions among academia, industry, and project outputs.
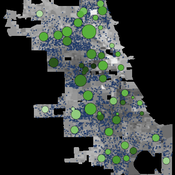
Modeling The Transition to Public School Choice (Model II from paper)
Spiro Maroulis Eytan Bakshy Louis Gomez Uri Wilensky | Published Friday, March 22, 2013 | Last modified Tuesday, August 27, 2013This is an agent-based model that captures the dynamic processes related to moving from an educational system where the school a student attends is based on assignment to a neighborhood school, to one that gives households more choice among existing and newly formed public schools.
Peer reviewed ABM to create populations with realistic Big Five Personality Trait Expressions
Michael Vogrin | Published Tuesday, May 30, 2023This model aims at creating agent populations that have “personalities”, as described by the Big Five Model of Personality. The expression of the Big Five in the agent population has the following properties, so that they resemble real life populations as closely as possible:
-The population mean of each trait is 0.5 on a scale from 0 to 1.
-The population-wide distribution of each trait approximates a normal distribution.
-The intercorrelations of the Big Five are close to those observed in the Literature.
The literature used to fit the model was a publication by Dimitri van der Linden, Jan te Nijenhuis, and Arnold B. Bakker:
…
Peer reviewed Coupled demographic dynamics of herd and household in pastoral systems
Mark Moritz Ian M Hamilton Andrew Yoak Abigail Buffington Chelsea E Hunter Daniel C Peart | Published Saturday, April 08, 2023This purpose of this model is to understand how the coupled demographic dynamics of herds and households constrain the growth of livestock populations in pastoral systems.
Peer reviewed An extended replication of Abelson's and Bernstein's community referendum simulation
Klaus G. Troitzsch | Published Friday, October 25, 2019 | Last modified Friday, August 25, 2023This is an extended replication of Abelson’s and Bernstein’s early computer simulation model of community referendum controversies which was originally published in 1963 and often cited, but seldom analysed in detail. This replication is in NetLogo 6.3.0, accompanied with an ODD+D protocol and class and sequence diagrams.
This replication replaces the original scales for attitude position and interest in the referendum issue which were distributed between 0 and 1 with values that are initialised according to a normal distribution with mean 0 and variance 1 to make simulation results easier compatible with scales derived from empirical data collected in surveys such as the European Value Study which often are derived via factor analysis or principal component analysis from the answers to sets of questions.
Another difference is that this model is not only run for Abelson’s and Bernstein’s ten week referendum campaign but for an arbitrary time in order that one can find out whether the distributions of attitude position and interest in the (still one-dimensional) issue stabilise in the long run.
An Agent-Based Model of Collective Action
Hai-Hua Hu | Published Tuesday, August 20, 2013We provide an agent-based model of collective action, informed by Granovetter (1978) and its replication model by Siegel (2009). We use the model to examine the role of ICTs in collective action under different cultural and political contexts.
ACT: Agent-based model of Critical Transitions
Igor Nikolic Oscar Kraan Steven Dalderop Gert Jan Kramer | Published Wednesday, October 18, 2017 | Last modified Monday, August 27, 2018ACT is an ABM based on an existing conceptualisation of the concept of critical transitions applied to the energy transition. With the model we departed from the mean-field approach simulated relevant actor behaviour in the energy transition.
Correlated random walk
Thibault Fronville | Published Friday, April 01, 2022 | Last modified Monday, April 25, 2022The first simple movement models used unbiased and uncorrelated random walks (RW). In such models of movement, the direction of the movement is totally independent of the previous movement direction. In other words, at each time step the direction, in which an individual is moving is completely random. This process is referred to as a Brownian motion.
On the other hand, in correlated random walks (CRW) the choice of the movement directions depends on the direction of the previous movement. At each time step, the movement direction has a tendency to point in the same direction as the previous one. This movement model fits well observational movement data for many animal species.
The presented agent based model simulated the movement of the agents as a correlated random walk (CRW). The turning angle at each time step follows the Von Mises distribution with a ϰ of 10. The closer ϰ gets to zero, the closer the Von Mises distribution becomes uniform. The larger ϰ gets, the more the Von Mises distribution approaches a normal distribution concentrated around the mean (0°).
This model is implemented in python and can be used as a building block for more complex agent based models that would rely on describing the movement of individuals with CRW.
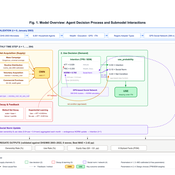
Peer reviewed STiMUS: A Stigmergic–Mutualistic Agent-Based Model of Teamwork on Shared Digital Artefacts (IMOI)
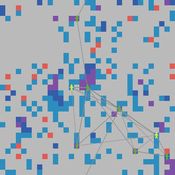
Yevgeny Patarakin | Published Friday, July 03, 2026 | Last modified Wednesday, July 22, 2026STiMUS (Stigmergic–Mutualistic IMOI Model) is an agent-based model of teamwork in socio-technical systems where contributors collaborate through shared digital artefacts — wiki pages, code files, issue tickets, project cards, Scratch projects — represented as patches in a NetLogo world. The model integrates two coordination mechanisms. Stigmergy is indirect coordination through traces left in a shared environment: each edit deposits a pheromone that diffuses to neighbouring patches and evaporates over time, so recent activity attracts further contributions. Mutualism is a reciprocal benefit loop in which valuable, well-maintained artefacts raise contributor motivation and shared understanding, while motivated contributors improve artefacts.
Contributors (turtles of the contributor breed) carry individual state: skill, motivation, shared-mental-model, specialty, benefit-gain, and an explicit-mode flag. At each tick every contributor selects a target artefact with an ant-colony-optimization-style rule weighing the artefact’s pheromone, incompleteness (1 - completeness), resource-value, and topic match between specialty and the artefact’s topic-tag; with probability p-explicit it instead takes the patch with the highest maintenance-need, modelling explicit task assignment. Each edit increases pheromone, quality, completeness and reuse-count, raises resource-value, lowers maintenance-need, and appends the editor to the artefact’s edit-authors list. When the previous last-editor-id differs from the current editor, the Edit Succession Ratio rises, the editor’s shared-mental-model grows, and a co-editing link is created — operationalising the idea that repeated cross-author succession on the same artefact builds shared understanding. Contributors’ motivation is updated from the benefit drawn from the visited artefact.
Each patch maintains a stigmergic layer (pheromone, quality, completeness, recentness, last-editor-id, edit-count, edit-authors) and a mutualistic layer (resource-value, reuse-count, maintenance-need, topic-tag), plus task flags (is-task?, task-complexity). Global monitors report the Edit Succession Ratio (ESR = cross-author-edits / total-edits, and an alternative esr-value = share of edited patches with more than one distinct author), mean-quality, mean-resource-value, a mutualism-index averaging contributor benefit and resource value, coediting-density (network density of the co-editing graph), active-pages-share, and task-completion-rate. The model logs every edit as a bipartite edge (tick, author_id, pageid, specialty, topic_tag, quality), exportable to CSV.
…
Displaying 10 of 60 results for "Meghan Mason" clear search