Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1145 results for "Oto Hudec" clear search
Exploration and Exploitation: Persistence with local exploration under varying resource distribution, resource availability over time and cost of relocation
Arpan Jani | Published Monday, September 30, 2019Organisms, Individuals and Organizations face the dilemma of exploration vs. exploitation
Identifying the optimal trade-off between the two is a challenge
Too much exploration (e.g. gaining new knowledge) can be detrimental to day-to-day survival and too much exploitation (applying existing knowledge) could be detrimental to long term survival esp. if conditions change over time
The purpose of the model is to investigate how the amount of resources acquired (wealth/success) is related to persistence with the strategy of local exploration under different resource distributions, availability of resources over time and cost of relocation

CEDSS is an agent-based model of domestic energy demand at the level of a small community.
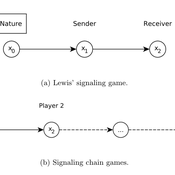
Lewis' Signaling Chains
Giorgio Gosti | Published Wednesday, January 14, 2015 | Last modified Friday, April 03, 2015Signaling chains are a special case of Lewis’ signaling games on networks. In a signaling chain, a sender tries to send a single unit of information to a receiver through a chain of players that do not share a common signaling system.
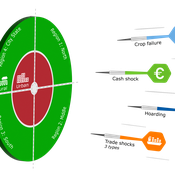
DARTS: modelling effects of shocks on global, regional, urban and rural food security
Geerten Hengeveld Hubert Fonteijn Pepijn van Oort | Published Tuesday, June 18, 2024Food trade networks represent a complex system where food is periodically produced in different regions of the world. Food is continuously stocked and traded. Food security in a globalised world is vulnerable to shocks. We present DARTS, a new agent based model that models monthly dynamics of food production, trade, stocking, consumption and food security for different interconnected world regions and a city state. Agents in different regions differ in their harvest seasons, wealth (rich and poor), degree of urbanisation and connection to domestic and global markets. DARTS was specifically designed to model direct and indirect effects of shocks in the food system. We introduce a new typology of 6 distinct shock types and analyse their impact on food security, modelling local and global effects and short term and longer term effects. An second important scientific novelty of the model is that DARTS can also model indirect effects of shocks (cascading in space and in time, lag effects due to trade and food stock buffering). A third important scientific novelty of the model is its’ capability of modelling food security at different scales, in which the rural/urban divide and differences in (intra-annually varying) production and trade connections play a key role. At the time of writing DARTS is yet insufficiently parameterised for accurate prediction for real world regions and cities. Simulations for a hypothetical in silico world with 3 regions and a city state show that DARTS can reproduce rich and complex dynamics with analogues in the real world. The scientific interest is more on deepening insight in process dynamics and chains of events that lead to ultimate shock effects on food security.
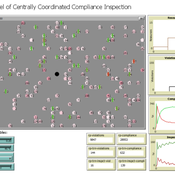
ICARUS - a multi-agent compliance inspection model
Slaven Smojver | Published Monday, May 09, 2022ICARUS is a multi-agent compliance inspection model (ICARUS - Inspecting Compliance to mAny RUleS). The model is applicable to environments where an inspection agency, via centrally coordinated inspections, examines compliance in organizations which must comply with multiple provisions (rules). The model (ICARUS) contains 3 types of agents: entities, inspection agency and inspectors / inspections. ICARUS describes a repeated, simultaneous, non-cooperative game of pure competition. Agents have imperfect, incomplete, asymmetric information. Entities in each move (tick) choose a pure strategy (comply/violate) for each rule, depending on their own subjective assessment of the probability of the inspection. The Inspection Agency carries out the given inspection strategy.
A more detailed description of the model is available in the .nlogo file.
Full description of the model (in line with the ODD+D protocol) and the analysis of the model (including verification, validation and sensitivity analysis) can be found in the attached documentation.
Evaluate government policies for farmers’ adoption and synergy in improving irrigation systems
Amir Hajimirzajan | Published Sunday, February 25, 2024The ABM model is designed to model the adaptability of farmers in DTIM. This model includes two groups of farmers and local government admins agents. Farmers with different levels, with low WP of DTIM, are looking for economic benefits and reduced irrigation and production costs. Meanwhile, the government is looking for strategic goals to maintain water resources’ sustainability. The local government admins employ incentives (subsidies in this study) to encourage farmers to DTIM. In addition, it is used as a tool for supervision and training farmers’ performance. Farmers are currently harvesting water resources with irrigation systems and different levels of technology, and they intend to provide short-term benefits. Farmers adjust the existing approach based on their knowledge of the importance of DTIM and propensity to increase WP and cost-benefit evaluation. DTIM has an initial implementation fee. Every farmer can increase WP by using government subsidies. If none of the farmers create optimal use of water resources, access to water resources will be threatened in the long term. This is considered a hypothetical cost for farmers who do not participate in DTIM. With DTIM, considering that local government admins’ facilities cover an essential part of implementation costs, farmers may think of profiting from local government admins’ facilities by selling that equipment, especially if the farmers in the following conditions may consider selling their developed irrigation equipment. In this case, the technology of their irrigation system will return to the state before development.
- When the threshold of farmers’ propensity to DTIM is low (for example, in the conditions of scarcity of access to sufficient training about the new irrigation system or its role in reducing the cost and sustainability of water resources)
- When the share of government subsidy is high, and as a result, the profit from the sale of equipment is attractive, especially in conditions of inflation.
- Finally, farmers’ honesty threshold should be reduced based on the positive experience of profit-seeking and deception among neighbors.
Increasing the share of government subsidies can encourage farmers to earn profits. Therefore, the government can help increase farmers’ profits by considering the assessment teams at different levels with DTIM training . local government admins evaluations monitor the behavior of farmers. If farmers sell their improved irrigation system for profit, they may be deprived of some local government admins’ services and the possibility of receiving subsidies again. Assessments The local government admins can increase farmers’ honesty. Next, the ABM model evaluates local government admins policies to achieve a suitable framework for water resources management in the Miandoab region.
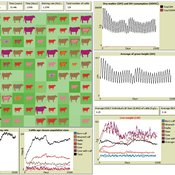
Peer reviewed SequiaBasalto model
Marco Janssen Irene Perez Ibarra Pierre Bommel Diego J. Soler-Navarro Alicia Tenza Peral Francisco Dieguez Cameroni | Published Friday, May 26, 2023This is a replication of the SequiaBasalto model, originally built in Cormas by Dieguez Cameroni et al. (2012, 2014, Bommel et al. 2014 and Morales et al. 2015). The model aimed to test various adaptations of livestock producers to the drought phenomenon provoked by climate change. For that purpose, it simulates the behavior of one livestock farm in the Basaltic Region of Uruguay. The model incorporates the price of livestock, fodder and paddocks, as well as the growth of grass as a function of climate and seasons (environmental submodel), the life cycle of animals feeding on the pasture (livestock submodel), and the different strategies used by farmers to manage their livestock (management submodel). The purpose of the model is to analyze to what degree the common management practices used by farmers (i.e., proactive and reactive) to cope with seasonal and interannual climate variations allow to maintain a sustainable livestock production without depleting the natural resources (i.e., pasture). Here, we replicate the environmental and livestock submodel using NetLogo.
One year is 368 days. Seasons change every 92 days. Each day begins with the growth of grass as a function of climate and season. This is followed by updating the live weight of cows according to the grass height of their patch, and grass consumption, which is determined based on the updated live weight. After consumption, cows grow and reproduce, and a new grass height is calculated. Cows then move to the patch with less cows and with the highest grass height. This updated grass height value will be the initial grass height for the next day.
Peer reviewed Circular Business Model experimentation: local biodigestion network
Igor Nikolic Kasper Pieter Hendrik Lange Gijsbert Korevaar Paulien Herder | Published Thursday, December 17, 2020 | Last modified Tuesday, June 29, 2021The purpose of the model is to explore the influence of the design of circular business models (CBMs) on CBM viability. The model represents an Industrial Symbiosis Network (ISN) in which a processor uses the organic waste from suppliers to produce biogas and nutrient rich digestate for local reuse. CBM viability is expressed as value captured (e.g., cash flow/tonne waste/agent) and the survival of the network over time (shown in the interface).
In the model, the value captured is calculated relative to the initial state, using incineration costs as a benchmark. Moderating variables are interactions with the waste incinerator and actor behaviour factors. Actors may leave the network when the waste supply for local production is too low, or when personal economic benefits are too low. When the processor decides to leave, the network fails. Theory of planned behaviour can be used to include agent behaviour in the simulations.
Peer reviewed MADTOR: Model for Assessing Drug Trafficking Organizations Resilience
Deborah Manzi | Published Friday, February 23, 2024 | Last modified Friday, February 27, 2026Criminal organizations operate in complex changing environments. Being flexible and dynamic allows criminal networks not only to exploit new illicit opportunities but also to react to law enforcement attempts at disruption, enhancing the persistence of these networks over time. Most studies investigating network disruption have examined organizational structures before and after the arrests of some actors but have disregarded groups’ adaptation strategies.
MADTOR simulates drug trafficking and dealing activities by organized criminal groups and their reactions to law enforcement attempts at disruption. The simulation relied on information retrieved from a detailed court order against a large-scale Italian drug trafficking organization (DTO) and from the literature.
The results showed that the higher the proportion of members arrested, the greater the challenges for DTOs, with higher rates of disrupted organizations and long-term consequences for surviving DTOs. Second, targeting members performing specific tasks had different impacts on DTO resilience: targeting traffickers resulted in the highest rates of DTO disruption, while targeting actors in charge of more redundant tasks (e.g., retailers) had smaller but significant impacts. Third, the model examined the resistance and resilience of DTOs adopting different strategies in the security/efficiency trade-off. Efficient DTOs were more resilient, outperforming secure DTOs in terms of reactions to a single, equal attempt at disruption. Conversely, secure DTOs were more resistant, displaying higher survival rates than efficient DTOs when considering the differentiated frequency and effectiveness of law enforcement interventions on DTOs having different focuses in the security/efficiency trade-off.
Overall, the model demonstrated that law enforcement interventions are often critical events for DTOs, with high rates of both first intention (i.e., DTOs directly disrupted by the intervention) and second intention (i.e., DTOs terminating their activities due to the unsustainability of the intervention’s short-term consequences) culminating in dismantlement. However, surviving DTOs always displayed a high level of resilience, with effective strategies in place to react to threatening events and to continue drug trafficking and dealing.
BEEHAVE Extension: Varroa mite control within Good Beekeeping Practice in Germany
Volker Grimm Jürgen Groeneveld Isabel Schödl | Published Wednesday, May 25, 2022 | Last modified Monday, November 07, 2022The western honey bee Apis mellifera is the most important pollinator in the world. The biggest threat to managed honey bees is the ectoparasitic mite Varroa destructor and the viruses DWV (Deformed Wing Virus) and APV (Acute Paralysis Virus) it transmits. Untreated honey bee colonies are expected to die within one to three years. This led to the development of strategies for beekeepers to control the Varroa mite in honey bee colonies and ensure the health and survival of their bee colonies, so called Good Beekeeping Practice. The aim of the extension of BEEHAVE was to represent the Good Beekeeping Practice of Varroa control in Germany. The relevant measures within the Varroa control strategies are drone brood removal as a Varroa trap and the treatment of bee colonies with organic acaricides (formic and oxalic acid) to kill the mites. This extension improves BEEHAVE and builds a bridge between beekeepers in practice and in the modelling world. It vastly contributes to the future use of BEEHAVE in beekeeping education in Germany.
Displaying 10 of 1145 results for "Oto Hudec" clear search