Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 272 results for "Philipp S. Sommer" clear search
Peer reviewed Correlated Random Walk (NetLogo)
Viktoriia Radchuk Uta Berger Thibault Fronville | Published Tuesday, May 09, 2023 | Last modified Monday, December 18, 2023This is NetLogo code that presents two alternative implementations of Correlated Random Walk (CRW):
- 1. drawing the turning angles from the uniform distribution, i.e. drawing the angle with the same probability from a certain given range;
- 2. drawing the turning angles from von Mises distribution.
The move lengths are drawn from the lognormal distribution with the specified parameters.
Correlated Random Walk is used to represent the movement of animal individuals in two-dimensional space. When modeled as CRW, the direction of movement at any time step is correlated with the direction of movement at the previous time step. Although originally used to describe the movement of insects, CRW was later shown to sufficiently well describe the empirical movement data of other animals, such as wild boars, caribous, sea stars.
…
Correlated random walk (Javascript)
Viktoriia Radchuk Uta Berger Thibault Fronville | Published Tuesday, May 09, 2023The first simple movement models used unbiased and uncorrelated random walks (RW). In such models of movement, the direction of the movement is totally independent of the previous movement direction. In other words, at each time step the direction, in which an individual is moving is completely random. This process is referred to as a Brownian motion.
On the other hand, in correlated random walks (CRW) the choice of the movement directions depends on the direction of the previous movement. At each time step, the movement direction has a tendency to point in the same direction as the previous one. This movement model fits well observational movement data for many animal species.
The presented agent based model simulated the movement of the agents as a correlated random walk (CRW). The turning angle at each time step follows the Von Mises distribution with a ϰ of 10. The closer ϰ gets to zero, the closer the Von Mises distribution becomes uniform. The larger ϰ gets, the more the Von Mises distribution approaches a normal distribution concentrated around the mean (0°).
In this script the turning angles (following the Von Mises distribution) are generated based on the the instructions from N. I. Fisher 2011.
This model is implemented in Javascript and can be used as a building block for more complex agent based models that would rely on describing the movement of individuals with CRW.
The Garbage Can Model of Organizational Choice
Guido Fioretti | Published Saturday, June 22, 2013We reconstruct Cohen, March and Olsen’s Garbage Can model of organizational choice as an agent-based model. We add another means for avoiding making decisions: buck-passing difficult problems to colleagues.

CEDSS is an agent-based model of domestic energy demand at the level of a small community.
Imperfect knowledge and stable governance in democracies
Carlos M Fernández-Márquez Francisco Jose Vazquez Luis Fernando Medina | Published Tuesday, February 05, 2019In this paper we introduce an agent-based model of elections and government formation where voters do not have perfect knowledge about the parties’ ideological position. Although voters are boundedly rational, they are forward-looking in that they try to assess the likely impact of the different parties over the resulting government. Thus, their decision rules combine sincere and strategic voting: they form preferences about the different parties but deem some of them as inadmissible and try to block them from office. We find that the most stable and durable coalition governments emerge at intermediate levels of informational ambiguity. When voters have very poor information about the parties, their votes are scattered too widely, preventing the emergence of robust majorities. But also, voters with highly precise perceptions about the parties will cluster around tiny electoral niches with a similar aggregate effect.
A Simulation of Arab Spring Protests Informed by Qualitative Evidence
Bruce Edmonds Stephanie Dornschneider | Published Monday, April 29, 2019 | Last modified Friday, May 24, 2019The purpose of the simulation was to explore and better understand the process of bridging between an analysis of qualitative data and the specification of a simulation. This may be developed for more serious processes later but at the moment it is merely an illustration.
This exercise was done by Stephanie Dornschneider (School of Politics and International Relations, University College Dublin) and Bruce Edmonds to inform the discussion at the Lorentz workshop on “Integrating Qualitative and Quantitative Data using Social Simulation” at Leiden in April 2019. The qualitative data was collected and analysed by SD. The model specification was developed as the result of discussion by BE & SD. The model was programmed by BE. This is described in a paper submitted to Social Simulation 2019 and (to some extent) in the slides presented at the workshop.
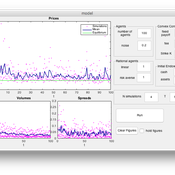
An Agent Based Model for implementing a double auction financial market
Annalisa Fabretti | Published Thursday, April 14, 2016The model implements a double auction financial markets with two types of agents: rational and noise. The model aims to study the impact of different compensation structure on the market stability and market quantities as prices, volumes, spreads.
Managing networked landscapes: conservation in fragmented, regionally connected world
Jacopo A. Baggio Michael Schoon Sechindra Vallury | Published Monday, December 09, 2019Exploring how learning and social-ecological networks influence management choice set and their ability to increase the likelihood of species coexistence (i.e. biodiversity) on a fragmented landscape controlled by different managers.
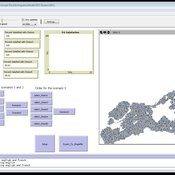
Mobility, Ethnicity, and Language-Based Immigrant Settlement Model - MELBIS
Liliana Perez Jonathan Gaudreau Suzana Dragicevic Taylor Anderson Aaron Leung | Published Monday, June 14, 2021 | Last modified Monday, June 14, 2021MELBIS-V1 is a spatially explicit agent-based model that allows the geospatial simulation of the decision-making process of newcomers arriving in the bilingual cities and boroughs of the island of Montreal, Quebec in CANADA, and the resulting urban segregation spatial patterns. The model was implemented in NetLogo, using geospatial raster datasets of 120m spatial resolution.
MELBIS-V2 enhances MELBIS-V1 to implement and simulate the decision-making processes of incoming immigrants, and to analyze the resulting spatial patterns of segregation as immigrants arrive and settle in various cities in Canada. The arrival and segregation of immigrants is modeled with MELBIS-V2 and compared for three major Canadian immigration gateways, including the City of Toronto, Metro Vancouver, and the City of Calgary.
Social model of a Team Developing a Planning-Methodology
Oswaldo Terán Christophe Sibertin | Published Monday, November 18, 2013 | Last modified Sunday, November 16, 2014The model represents a team intended at designing a methodology for Institutional Planning. Included in ICAART’14 to exemplify how emotions can be identified in SocLab; and in ESSA’14 to show the Efficiency of Organizational Withdrawal vs Commitment.
Displaying 10 of 272 results for "Philipp S. Sommer" clear search