Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1132 results for "Oto Hudec" clear search
Spatial rangeland model
Marco Janssen | Published Tuesday, January 22, 2019 | Last modified Friday, March 04, 2022Spatial explicit model of a rangeland system, based on Australian conditions, where grass, woody shrubs and fire compete fore resources. Overgrazing can cause the system to flip from a healthy state to an unproductive shrub state. With the model one can explore the consequences of different movement rules of the livestock on the resilience of the system.
The model is discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/.
Vole-Mustelid model
Viktoriia Radchuk Harry Peter Andreassen Rolf Anker Ims | Published Monday, October 07, 2019The model reflects the predator-prey mustelid-vole population dynamics, typically observed in boreal systems. The goal of the model is to assess which intrinsic and extrinsic factors (or factor combinations) are needed for the generation of the cyclic pattern typically observed in natural vole populations. This goal is achieved by contrasting the alternative model versions by “switching off” some of the submodels in order to reflect the four combinations of the factors hypothesized to be driving vole cycles.
WEEM (Woodlot Establishment and Expansion Model)
Jürgen Groeneveld Vianny Ahimbisibwe Uta Berger Melvin Lippe Susan Balaba Tumwebaze Eckhard Auch | Published Monday, September 27, 2021The agent-based model WEEM (Woodlot Establishment and Expansion Model) as described in the journal article, has been designed to make use of household socio-demographics (household status, birth, and death events of households), to better understand the temporal dynamics of woodlot in the buffer zones of Budongo protected forest reserve, Masindi district, Uganda. The results contribute to a mechanistic understanding of what determines the current gap between intention and actual behavior in forest land restoration at farm level.

Peer Review with Multiple Reviewers
Flaminio Squazzoni Federico Bianchi | Published Thursday, September 10, 2015This ABM looks at the effect of multiple reviewers and their behavior on the quality and efficiency of peer review. It models a community of scientists who alternatively act as “author” or “reviewer” at each turn.
Agent-based simulation of small group decision-making under no communication
Christopher Poile | Published Thursday, May 26, 2016A computational model of a classic small group study by Alex Bavelas. This computational model was designed to explore the difficulty in translating a seemingly simple real-world experiment into a computational model.
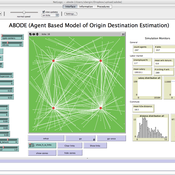
ABODE - Agent Based Model of Origin Destination Estimation
D Levinson | Published Monday, August 29, 2011 | Last modified Saturday, April 27, 2013The agent based model matches origins and destinations using employment search methods at the individual level.
How does knowledge infrastructure mobilization influence the safe operating space of regulated exploited ecosystems?
Jean-Denis Mathias | Published Tuesday, July 17, 2018Decision-makers often have to act before critical times to avoid the collapse of ecosystems using knowledge \textcolor{red}{that can be incomplete or biased}. Adaptive management may help managers tackle such issues. However, because the knowledge infrastructure required for adaptive management may be mobilized in several ways, we study the quality and the quantity of knowledge provided by this knowledge infrastructure. In order to analyze the influence of mobilized knowledge, we study how the following typology of knowledge and its use may impact the safe operating space of exploited ecosystems: 1) knowledge of the past based on a time series distorted by measurement errors; 2) knowledge of the current systems’ dynamics based on the representativeness of the decision-makers’ mental models of the exploited ecosystem; 3) knowledge of future events based on decision-makers’ likelihood estimates of extreme events based on modeling infrastructure (models and experts to interpret them) they have at their disposal. We consider different adaptive management strategies of a general regulated exploited ecosystem model and we characterize the robustness of these strategies to biased knowledge. Our results show that even with significant mobilized knowledge and optimal strategies, imperfect knowledge may still shrink the safe operating space of the system leading to the collapse of the system. However, and perhaps more interestingly, we also show that in some cases imperfect knowledge may unexpectedly increase the safe operating space by suggesting cautious strategies.
The code enables to calculate the safe operating spaces of different managers in the case of biased and unbiased knowledge.
Can ethnic tolerance curb self-reinforcing school segregation? A theoretical Agent Based Model
Lucas Sage Andreas Flache | Published Monday, August 10, 2020Schelling and Sakoda prominently proposed computational models suggesting that strong ethnic residential segregation can be the unintended outcome of a self-reinforcing dynamic driven by choices of individuals with rather tolerant ethnic preferences. There are only few attempts to apply this view to school choice, another important arena in which ethnic segregation occurs. In the current paper, we explore with an agent-based theoretical model similar to those proposed for residential segregation, how ethnic tolerance among parents can affect the level of school segregation. More specifically, we ask whether and under which conditions school segregation could be reduced if more parents hold tolerant ethnic preferences. We move beyond earlier models of school segregation in three ways. First, we model individual school choices using a random utility discrete choice approach. Second, we vary the pattern of ethnic segregation in the residential context of school choices systematically, comparing residential maps in which segregation is unrelated to parents’ level of tolerance to residential maps reflecting their ethnic preferences. Third, we introduce heterogeneity in tolerance levels among parents belonging to the same group. Our simulation experiments suggest that ethnic school segregation can be a very robust phenomenon, occurring even when about half of the population prefers mixed to segregated schools. However, we also identify a “sweet spot” in the parameter space in which a larger proportion of tolerant parents makes the biggest difference. This is the case when parents have moderate preferences for nearby schools and there is only little residential segregation. Further experiments are presented that unravel the underlying mechanisms.
The purpose of this model is to enhance a basic ABM through a simple set of rules identified using the activity-driven models in order to produce more realistic patterns of pedestrian movement.
Social and Childcare Provision in Kinship Networks
Umberto Gostoli Eric Silverman | Published Thursday, October 21, 2021This model simulations social and childcare provision in the UK. Agents within simulated households can decide to provide for informal care, or pay for private care, for their loved ones after they have provided for childcare needs. Agents base these decisions on factors including their own health, employment status, financial resources, relationship to the individual in need and geographical location. This model extends our previous simulations of social care by simulating the impact of childcare demand on social care availability within households, which is known to be a significant constraint on informal care provision.
Results show that our model replicates realistic patterns of social and child care provision, suggesting that this framework can be a valuable aid to policy-making in this area.
Displaying 10 of 1132 results for "Oto Hudec" clear search