Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1132 results for "Oto Hudec" clear search
Implementation of 'satisficing’ as a model for farmers’ decision-making in an agent-based model of groundwater over-exploitation
Marvin Nebel | Published Monday, May 20, 2013This model uses ’satisficing’ as a model for farmers’ decision making to learn about influences of alternative decision-making models on simulation results and to exemplify a way to transform a rather theoretical concept into a feasible decision-making model for agent-based farming models.
How does the world population adapt its policies on energy when it is confronted with a climate change? This model combines a climate-economy model with adaptive agents.
MixFarm ABM Model
Leigh Anderson | Published Thursday, March 03, 2016MixFarmABM Model examines the competitiveness of second-generation biofuel crops with existing crops and beef cows at the farm level and their impact on the farm structure.
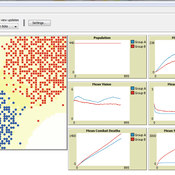
WOLVES - simulating wolf reappearance in the Netherlands
Kim van Vliet Zoë Delamore | Published Saturday, April 27, 2019This is an agent-based model, simulating wolf (Canis Lupus) reappearance in the Netherlands. The model’s purpose is to allow researchers to investigate the reappearance of wolves in the Netherlands and the possible effect of human interference. Wolf behaviour is modelled according to the literature. The suitability of the Dutch landscape for wolf settlement has been determined by Lelieveld (2012) [1] and is transformed into a colour-coded map of the Netherlands. The colour-coding is the main determinant of wolf settlement. Human involvement is modelled through the public opinion, which varies according to the size, composition and behaviour of the wolf population.
[1] Lelieveld, G.: Room for wolf comeback in the Netherlands, (2012).
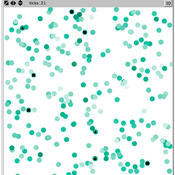
This model was developed to test the usability of evolutionary computing and reinforcement learning by extending a well known agent-based model. Sugarscape (Epstein & Axtell, 1996) has been used to demonstrate migration, trade, wealth inequality, disease processes, sex, culture, and conflict. It is on conflict that this model is focused to demonstrate how machine learning methodologies could be applied.
The code is based on the Sugarscape 2 Constant Growback model, availble in the NetLogo models library. New code was added into the existing model while removing code that was not needed and modifying existing code to support the changes. Support for the original movement rule was retained while evolutionary computing, Q-Learning, and SARSA Learning were added.
Human-in-the-loop Experiment of the Strategic Coalition Formation using the glove game
Andrew Collins | Published Monday, November 23, 2020 | Last modified Wednesday, June 22, 2022The purpose of the model is to collect information on human decision-making in the context of coalition formation games. The model uses a human-in-the-loop approach, and a single human is involved in each trial. All other agents are controlled by the ABMSCORE algorithm (Vernon-Bido and Collins 2020), which is an extension of the algorithm created by Collins and Frydenlund (2018). The glove game, a standard cooperative game, is used as the model scenario.
The intent of the game is to collection information on the human players behavior and how that compares to the computerized agents behavior. The final coalition structure of the game is compared to an ideal output (the core of the games).
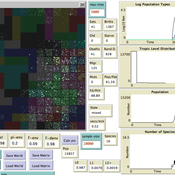
A test-bed ecological model
Bruce Edmonds | Published Sunday, May 04, 2014 | Last modified Wednesday, May 15, 2019This is a multi-patch meta-population ecological model. It intended as a test-bed in which to test the impact of humans with different kinds of social structure.
Peer reviewed Strategy with Externalities
J M Applegate Glenn Hoetker | Published Thursday, December 21, 2017The SWE models firms search behaviour as the performance landscape shifts. The shift represents society’s pricing of negative externalities, and the performance landscape is an NK structure. The model is written in NetLogo.
Viticulture development in emerging markets: Małopolska region
Marcin Czupryna Bogumił Kamiński Paweł Oleksy Piotr Przybek | Published Tuesday, November 28, 2017 | Last modified Saturday, June 16, 2018Model explains both the final state and the dynamics of the development process of the wine sector in the Małopolska region in Poland. Model admits heterogeneous agents (regular farms,large and small vineyards).
Peer reviewed COMMAND-AND-CONTROL
Farzaneh Davari | Published Tuesday, September 10, 2019 | Last modified Thursday, September 12, 2019The command and control policy in natural resource management, including water resources, is a longstanding established policy that has been theoretically and practically argued from the point of view of social-ecological complex systems. With the intention of making a system ecologically resilient, these days, policymakers apply the top-down policies of controlling communities through regulations. To explore how these policies may work and to understand whether the ecological goal can be achieved via command and control policy, this research uses the capacity of Agent-Based Modeling (ABM) as an experimental platform in the Urmia Lake Basin (ULB) in Iran, which is a social-ecological complex system and has gone through a drought process.
Despite the uncertainty of the restorability capacity of the lake, there has been a consensus on the possibility to artificially restore the lake through the nationally managed Urmia Lake Restoratoin Program (ULRP). To reduce water consumption in the Basin, the ULRP widely targets the agricultural sector and proposes the project of changing crop patterns from high-water-demand (HWD) to low-water-demand (LWD), which includes a component to control water consumption by establishing water-police forces.
Using a wide range of multidisciplinary studies about Urmia Lake at the Basin and sub-basins as well as qualitative information at micro-level as the main conceptual sources for the ABM, the findings under different strategies indicate that targeting crop patterns change by legally limiting farmers’ access to water could force farmers to change their crop patterns for a short period of time as long as the number of police constantly increases. However, it is not a sustainable policy for either changing the crop patterns nor restoring the lake.
Displaying 10 of 1132 results for "Oto Hudec" clear search