Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1004 results for "Dave van Wees" clear search

Peer reviewed Ants Digging Networks
Elske van der Vaart | Published Friday, September 14, 2018This is a NetLogo version of Buhl et al.’s (2005) model of self-organised digging activity in ant colonies. It was built for a master’s course on self-organisation and its intended use is still educational. The ants’ behavior can easily be changed by toggling switches on the interface, or, for more advanced students, there is R code included allowing the model to be run and analysed through RNetLogo.
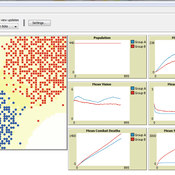
Non-attentional visual information transmission in groups under predation
J. Fransje Weerden, van | Published Wednesday, March 25, 2020Our aim is to show effects of group living when only low-level cognition is assumed, such as pattern recognition needed for normal functioning, without assuming individuals have knowledge about others around them or warn them actively.
The model is of a group of vigilant foragers staying within a patch, under attack by a predator. The foragers use attentional scanning for predator detection, and flee after detection. This fleeing action constitutes a visual cue to danger, and can be received non-attentionally by others if it occurs within their limited visual field. The focus of this model is on the effectiveness of this non-attentional visual information reception.
A blind angle obstructing cue reception caused by behaviour can exist in front, morphology causes a blind angle in the back. These limitations are represented by two visual field shapes. The scan for predators is all-around, with distance-dependent detection; reception of flight cues is limited by visual field shape.
Initial parameters for instance: group sizes, movement, vision characteristics for predator detection and for cue reception. Captures (failure), number of times the information reached all individuals at the same time (All-fled, success), and several other effects of the visual settings are recorded.
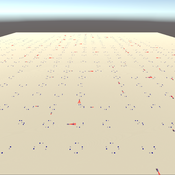
3D Urban Traffic Simulator (ABM) in Unity
Daniel Birks Sedar Olmez Obi Thompson Sargoni Alison Heppenstall Annabel Whipp Ed Manley | Published Friday, January 22, 2021 | Last modified Monday, March 22, 2021The Urban Traffic Simulator is an agent-based model developed in the Unity platform. The model allows the user to simulate several autonomous vehicles (AVs) and tune granular parameters such as vehicle downforce, adherence to speed limits, top speed in mph and mass. The model allows researchers to tune these parameters, run the simulator for a given period and export data from the model for analysis (an example is provided in Jupyter Notebook).
The data the model is currently able to output are the following:
…
Simulation model for compliance behaviour
Esther Van Asselt Sjoukje A Osinga | Published Friday, October 03, 2014 | Last modified Tuesday, December 08, 2015This model can be used to optimize intervention strategies for inspection services.
Sorghum supply development in Meru County, Kenya
Tim Verwaart Coen Van Wagenberg | Published Wednesday, September 06, 2017 | Last modified Thursday, May 30, 2019Trust between farmers and processors is a key factor in developing stable supply chains including “bottom of the pyramid”, small-scale farmers. This simulation studies a case with 10000 farmers.
Peer reviewed An Agent Based Model to assess resilience and efficiency of food supply chains
George Ak Van Voorn Geerten Hengeveld | Published Thursday, November 05, 2020This is an Agent Based Model of a generic food chain network consisting of stylized individuals representing producers, traders, and consumers. It is developed to: 1/ to describe the dynamically changing disaggregated flows of crop items between these agents, and 2/ to be able to explicitly consider agent behavior. The agents have implicit personal objectives for trading. Resilience and efficiency are quantified using the ascendency concept by linking these to the fraction of fulfillment of the overall explicit objective to have all consumers meet their food requirement. Different types of network structures in combination with different agent interaction types under different types of stylized shocks can be simulated.
This model was developed to test the usability of evolutionary computing and reinforcement learning by extending a well known agent-based model. Sugarscape (Epstein & Axtell, 1996) has been used to demonstrate migration, trade, wealth inequality, disease processes, sex, culture, and conflict. It is on conflict that this model is focused to demonstrate how machine learning methodologies could be applied.
The code is based on the Sugarscape 2 Constant Growback model, availble in the NetLogo models library. New code was added into the existing model while removing code that was not needed and modifying existing code to support the changes. Support for the original movement rule was retained while evolutionary computing, Q-Learning, and SARSA Learning were added.
Peer reviewed Charging behaviour of electric vehicle drivers
Wilfried van Sark Annemijn Peters Floor Alkemade Mart van der Kam | Published Wednesday, May 08, 2019 | Last modified Tuesday, April 14, 2020This model was developed to study the combination of electric vehicles (EVs) and intermitten renewable energy sources. The model presents an EV fleet in a fictional area, divided into a residential area, an office area and commercial area. The area has renewable energy sources: wind and PV solar panels. The agents can be encouraged to charge their electric vehicles at times of renewable energy surplus by introducing different policy interventions. Other interesting variables in the model are the installed renewable energy sources, EV fleet composition and available charging infrastructure. Where possible, use emperical data as input for our model. We expand upon previous models by incorporating environmental self-identity and range anxiety as agent variables.
University Connectivity
Rachel Wozniak Nick Glover Chris English Juan Cisneros | Published Tuesday, November 30, 2021This model is designed to show the effects of personality types and student organizations have on ones chance to making friendships in a university setting. As known from psychology studies, those that are extroverted have an easier chance making friendships in comparison to those that are introverted.
Once every tick a pair of students (nodes) will be randomly selected they will then have the chance to either be come friends or not (create an edge or not) based on their personality type (you are able to change what the effect of each personality is) and whether or not they are in the same club (you can change this value) then the model triggers the next tick cycle to begin.
Peer reviewed Evolution of Sex
Kristin Crouse | Published Sunday, June 05, 2016 | Last modified Wednesday, February 18, 2026Evolution of Sex is a NetLogo model that illustrates the advantages and disadvantages of sexual and asexual reproductive strategies. It seeks to demonstrate the answer to the question “Why do we have sex?”
Displaying 10 of 1004 results for "Dave van Wees" clear search