Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 366 results for "John C Moore" clear search
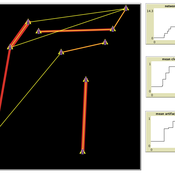
A Simulation of Arab Spring Protests Informed by Qualitative Evidence
Bruce Edmonds Stephanie Dornschneider | Published Monday, April 29, 2019 | Last modified Friday, May 24, 2019The purpose of the simulation was to explore and better understand the process of bridging between an analysis of qualitative data and the specification of a simulation. This may be developed for more serious processes later but at the moment it is merely an illustration.
This exercise was done by Stephanie Dornschneider (School of Politics and International Relations, University College Dublin) and Bruce Edmonds to inform the discussion at the Lorentz workshop on “Integrating Qualitative and Quantitative Data using Social Simulation” at Leiden in April 2019. The qualitative data was collected and analysed by SD. The model specification was developed as the result of discussion by BE & SD. The model was programmed by BE. This is described in a paper submitted to Social Simulation 2019 and (to some extent) in the slides presented at the workshop.
Peer reviewed Visibility of archaeological social networks
Claudine Gravel-Miguel | Published Sunday, November 26, 2023The purpose of this model is to explore the impact of combining archaeological palimpsests with different methods of cultural transmission on the visibility of prehistoric social networks. Up until recently, Paleolithic archaeologists have relied on stylistic similarities of artifacts to reconstruct social networks. However, this method - which is successfully applied to more recent ceramic assemblages - may not be applicable to Paleolithic assemblages, as several of those consist of palimpsests of occupations. Therefore, this model was created to study how palimpsests of occupation affect our social network reconstructions.
The model simplifies inter-groups interactions between populations who share cultural traits as they produce artifacts. It creates a proxy archaeological record of artifacts with stylistic traits that can then be used to reconstruct interactions. One can thus use this model to compare the networks reconstructed through stylistic similarities with direct contact.
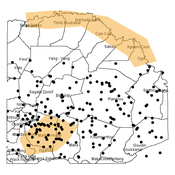
Agent-based modeling of the spatio-temporal distribution of Sahelian transhumant herds
Cheick Amed Diloma Gabriel TRAORE Etienne DELAY Alassane Bah Djibril Diop | Published Tuesday, May 20, 2025Sahelian transhumance is a seasonal pastoral mobility between the transhumant’s terroir of origin and one or more host terroirs. Sahelian transhumance can last several months and extend over hundreds of kilometers. Its purpose is to ensure efficient and inexpensive feeding of the herd’s ruminants. This paper describes an agent-based model to determine the spatio-temporal distribution of Sahelian transhumant herds and their impact on vegetation. Three scenarios based on different values of rainfall and the proportion of vegetation that can be grazed by transhumant herds are simulated. The results of the simulations show that the impact of Sahelian transhumant herds on vegetation is not significant and that rainfall does not impact the alley phase of transhumance. The beginning of the rainy season has a strong temporal impact on the spatial distribution of transhumant herds during the return phase of transhumance.
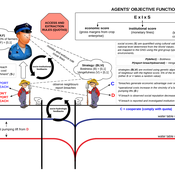
The Groundwater Commons Game
Juan Castilla-Rho Rodrigo Rojas | Published Thursday, May 11, 2017 | Last modified Saturday, September 16, 2017The Groundwater Commons Game synthesises and extends existing work on human cooperation and collective action, to elucidate possible determinants and pathways to regulatory compliance in groundwater systems globally.
Resisting hostility
Sylvie Huet | Published Thursday, December 20, 2018We propose an agent-based model leading to a decrease or an increase of hostility between agents after a major cultural threat such as a terrorist attack. The model is inspired from the Terror Management Theory and the Social Judgement Theory. An agent has a cultural identity defined through its acceptance segments about each of three different cultural worldviews (i.e., Atheist, Muslim, Christian) of the considered society. An agent’s acceptance segment is composed from its acceptable positions toward a cultural worldview, including its most acceptable position. An agent forms an attitude about another agent depending on the similarity between their cultural identities. When a terrorist attack is perpetrated in the name of an extreme cultural identity, the negatively perceived agents from this extreme cultural identity point of view tend to decrease the width of their acceptance segments in order to differentiate themselves more from the threatening cultural identity
GRASP world
Gert Jan Hofstede | Published Tuesday, April 16, 2019This agent-based model investigates group longevity in a population in a foundational way, using theory on social relations and culture. It is the first application of the GRASP meta-model for social agents, containing elements of Groups, Rituals, Affiliation, Status, and Power. It can be considered an exercise in artificial sociality: a culture-general, content-free base-line trust model from which to engage in more specific studies. Depending on cultural settings for individualism and power distance, as well as settings for xenophobia and for the increase of trust over group life, the GRASP world model generates a variety of patters. Number of groups ranges from one to many, composition from random to segregated, and pattern genesis from rapid to many hundreds of time steps. This makes GRASP world an instrument that plausibly models some basic elements of social structure in different societies.
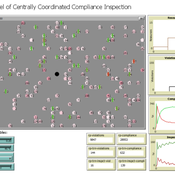
ICARUS - a multi-agent compliance inspection model
Slaven Smojver | Published Monday, May 09, 2022ICARUS is a multi-agent compliance inspection model (ICARUS - Inspecting Compliance to mAny RUleS). The model is applicable to environments where an inspection agency, via centrally coordinated inspections, examines compliance in organizations which must comply with multiple provisions (rules). The model (ICARUS) contains 3 types of agents: entities, inspection agency and inspectors / inspections. ICARUS describes a repeated, simultaneous, non-cooperative game of pure competition. Agents have imperfect, incomplete, asymmetric information. Entities in each move (tick) choose a pure strategy (comply/violate) for each rule, depending on their own subjective assessment of the probability of the inspection. The Inspection Agency carries out the given inspection strategy.
A more detailed description of the model is available in the .nlogo file.
Full description of the model (in line with the ODD+D protocol) and the analysis of the model (including verification, validation and sensitivity analysis) can be found in the attached documentation.
Peer reviewed A Bayesian Nash Equilibrium (BNE)-informed ABM for pedestrian evacuation in different constricted spaces
Jiaqi Ge Yiyu Wang Alexis Comber | Published Wednesday, October 11, 2023This BNE-informed ABM ultimately aims to provide a more realistic description of complicated pedestrian behaviours especially in high-density and life-threatening situations. Bayesian Nash Equilibrium (BNE) was adopted to reproduce interactive decision-making process among rational and game-playing agents. The implementations of 3 behavioural models, which are Shortest Route (SR) model, Random Follow (RF) model, and BNE model, make it possible to simulate emergent patterns of pedestrian behaviours (e.g. herding and self-organised queuing behaviours, etc.) in emergency situations.
According to the common features of previous mass trampling accidents, a series of simulation experiments were performed in space with 3 types of barriers, which are Horizontal Corridors, Vertical Corridors, and Random Squares, standing for corridors, bottlenecks and intersections respectively, to investigate emergent behaviours of evacuees in varied constricted spatial environments. The output of this ABM has been available at https://data.mendeley.com/datasets/9v4byyvgxh/1.
A Simple Agent Based Modeling Tool for Plastic and Debris Tracking in Oceans
Subu Kandaswamy Koushik Sura Bhaskar Sai Amulya Murukutla Sai Pranay Raju Chinthala Abhishek Bobbillapati | Published Monday, October 04, 2021Plastics and the pollution caused by their waste have always been a menace to both nature and humans. With the continual increase in plastic waste, the contamination due to plastic has stretched to the oceans. Many plastics are being drained into the oceans and rose to accumulate in the oceans. These plastics have seemed to form large patches of debris that keep floating in the oceans over the years. Identification of the plastic debris in the ocean is challenging and it is essential to clean plastic debris from the ocean. We propose a simple tool built using the agent-based modeling framework NetLogo. The tool uses ocean currents data and plastic data both being loaded using GIS (Geographic Information System) to simulate and visualize the movement of floatable plastic and debris in the oceans. The tool can be used to identify the plastic debris that has been piled up in the oceans. The tool can also be used as a teaching aid in classrooms to bring awareness about the impact of plastic pollution. This tool could additionally assist people to realize how a small plastic chunk discarded can end up as large debris drifting in the oceans. The same tool might help us narrow down the search area while looking out for missing cargo and wreckage parts of ships or flights. Though the tool does not pinpoint the location, it might help in reducing the search area and might be a rudimentary alternative for more computationally expensive models.
The Travel-tour case study
Christophe Sibertin-Blanc Françoise Adreit Joseph El Gemayel | Published Sunday, May 19, 2013 | Last modified Friday, June 14, 2013This model describes and analyses the Travel-Tour Case study.
Displaying 10 of 366 results for "John C Moore" clear search