Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 9 of 19 results persistence clear search
Exploration and Exploitation: Persistence with local exploration under varying resource distribution, resource availability over time and cost of relocation
Arpan Jani | Published Monday, September 30, 2019Organisms, Individuals and Organizations face the dilemma of exploration vs. exploitation
Identifying the optimal trade-off between the two is a challenge
Too much exploration (e.g. gaining new knowledge) can be detrimental to day-to-day survival and too much exploitation (applying existing knowledge) could be detrimental to long term survival esp. if conditions change over time
The purpose of the model is to investigate how the amount of resources acquired (wealth/success) is related to persistence with the strategy of local exploration under different resource distributions, availability of resources over time and cost of relocation
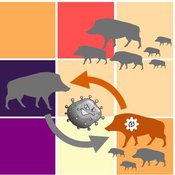
Classical Swine Fever in wild boars
Volker Grimm Stephanie Kramer-Schadt Cédric Scherer Martin Lange Hans-Hermann Thulke | Published Friday, September 06, 2019The model is a combination of a spatially explicit, stochastic, agent-based model for wild boars (Sus scrofa L.) and an epidemiological model for the Classical Swine Fever (CSF) virus infecting the wild boars.
The original model (Kramer-Schadt et al. 2009) was used to assess intrinsic (system immanent host-pathogen interaction and host life-history) and extrinsic (spatial extent and density) factors contributing to the long-term persistence of the disease and has further been used to assess the effects of intrinsic dynamics (Lange et al. 2012a) and indirect transmission (Lange et al. 2016) on the disease course. In an applied context, the model was used to test the efficiency of spatiotemporal vaccination regimes (Lange et al. 2012b) as well as the risk of disease spread in the country of Denmark (Alban et al. 2005).
References: See ODD model description.
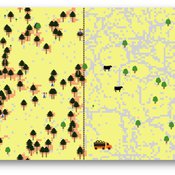
TRUE GRASP (Tree Recruitment Under Exotic GRAsses in a Savanna-Pineland)
is a socio-ecological agent-based model (ABM) and role playing game (RPG) for farmers and other stakeholders involved in rural landscape planning.
The purpose of this model is to allow actors to explore the individual and combined effects - as well as tradeoffs - of three methods of controlling exotic grasses in pine savannas: fire, weeding, and grazing cattle.
Design of TRUE GRASP is based on 3 years of socio-ecological fieldwork in a human-induced pine savanna in La Sepultura Biosphere Reserve (SBR) in the Mexican state of Chiapas. In this savanna, farmers harvest resin from Pinus oocarpa, which is used to produce turpentine and other products. However, long term persistence of this activity is jeopardized by low tree recruitment due to exotic tall grass cover in the forest understory (see Braasch et al., 2017). The TRUE GRASP model provides the user with different management strategies for controlling exotic grass cover and avoiding possible regime shifts, which in the case of the SBR would jeopardize resin harvesting.
Modeling a Victim-Centered Approach for Detection of Human Trafficking Victims within Migration Flows
Kyle Ballard Brant M Horio | Published Saturday, September 23, 2017The model employs an agent-based model for exploring the victim-centered approach to identifying human trafficking and the approach’s effectiveness in an abstract representation of migrant flows.
04 TpLab V2.08 – Teleological Pruning Laboratory
Garvin Boyle | Published Saturday, April 15, 2017Our societal belief systems are pruned by evolution, informing our unsustainable economies. This is one of a series of models exploring the dynamics of sustainable economics – PSoup, ModEco, EiLab, OamLab, MppLab, TpLab, CmLab.

SMILI: Small-scale fisheries Institutions and Local Interactions
Emilie Lindkvist Maja Schlüter Xavier Basurto | Published Thursday, March 09, 2017The model represents an archetypical fishery in a co-evolutionary social-ecological environment, capturing different dimensions of trust between fishers and fish buyers for the establishment and persistence of self-governance arrangements.
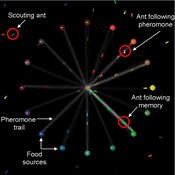
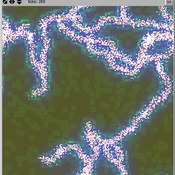
Composite Collective Decision Making - ant colony foraging model
Tomer Czaczkes Benjamin I Czaczkes | Published Thursday, December 17, 2015The model explores how two types of information - social (in the form of pheromone trails) and private (in the form of route memories) affect ant colony level foraging in a variable enviroment.
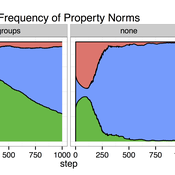
Cultural Group Selection of Sustainable Institutions
Timothy Waring Paul Smaldino Sandra H Goff | Published Wednesday, June 10, 2015 | Last modified Tuesday, August 04, 2015We develop a spatial, evolutionary model of the endogenous formation and dissolution of groups using a renewable common pool resource. We use this foundation to measure the evolutionary pressures at different organizational levels.
Soil microbe-predator model with enzymes
Randall Boone John C Moore Akihiro Koyama Kirstin Holfelder | Published Thursday, November 21, 2013We seek to improve understanding of roles enzyme play in soil food webs. We created an agent-based simulation of a simple food web that includes enzymatic activity. The model was used in a publication, Moore et al. (in press; Biochemistry).
Displaying 9 of 19 results persistence clear search