Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 131 results for "Daniel G Brown" clear search
Peer reviewed Agent-Based Ramsey growth model with Brown and Green capital (ABRam-BG)
Sarah Wolf Aida Sarai Figueroa Alvarez | Published Monday, December 09, 2024The purpose of the ABRam-BG model is to study belief dynamics as a potential driver of green (growth) transitions and illustrate their dynamics in a closed, decentralized economy populated by utility maximizing agents with an environmental attitude. The model is built using the ABRam-T model (for model visit: https://doi.org/10.25937/ep45-k084) and introduces two types of capital – green (low carbon intensity) and brown (high carbon intensity) – with their respective technological progress levels. ABRam-BG simulates a green transition as an emergent phenomenon resulting from well-known opinion dynamics along the economic process.
MASTOC - A Multi-Agent System of the Tragedy Of The Commons
Julia Schindler | Published Tuesday, November 30, 2010 | Last modified Saturday, April 27, 2013MASTOC is a replication of the Tragedy of the Commons by G. Hardin, programmed in NetLogo 4.0.4, based on behavioral game theory and Nash solution.
The PARSO_demo Model
Davide Secchi | Published Tuesday, November 05, 2019This model explores different aspects of the formation of urban neighbourhoods where residents believe in values distant from those dominant in society. Or, at least, this is what the Danish government beliefs when they discuss their politics about parallel societies. This simulation is set to understand (a) whether these alternative values areas form and what determines their formation, (b) if they are linked to low or no income residents, and (c) what happens if they disappear from the map. All these three points are part of the Danish government policy. This agent-based model is set to understand the boundaries and effects of this policy.
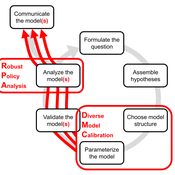
DMC-RPA: Diverse Model Calibration for Robust Policy Analysis (applied to an ABM of smallholder farmer resilience)
Tim Williams | Published Sunday, August 30, 2020This repository contains: (1) a model calibration procedure that identifies a set of diverse, plausible models; and (2) an ABM of smallholder agriculture, which is used as a case study application for the calibration method. By identifying a set of diverse models, the calibration method attends to the issue of “equifinality” prevalent in complex systems, which is a situation where multiple plausible process descriptions exist for a single outcome.
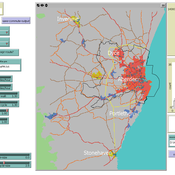
Transport simulation in a real road network
Gary Polhill Jiaqi Ge | Published Tuesday, April 17, 2018 | Last modified Tuesday, April 17, 2018Ge, J., & Polhill, G. (2016). Exploring the Combined Impact of Factors Influencing Commuting Patterns and CO2 Emission in Aberdeen Using an Agent-Based Model. Journal of Artificial Societies and Social Simulation, 19(3). http://jasss.soc.surrey.ac.uk/19/3/11.html
We develop an agent-based transport model using a realistic GIS-enabled road network and the car following method. The model can be used to study the impact of social interventions such as flexi-time and workplace sharing, as well as large infrastructure such as the construction of a bypass or highway. The model is developed in Netlogo version 5 and requires road network data in GIS format to run.
WOLVES - simulating wolf reappearance in the Netherlands
Kim van Vliet Zoë Delamore | Published Saturday, April 27, 2019This is an agent-based model, simulating wolf (Canis Lupus) reappearance in the Netherlands. The model’s purpose is to allow researchers to investigate the reappearance of wolves in the Netherlands and the possible effect of human interference. Wolf behaviour is modelled according to the literature. The suitability of the Dutch landscape for wolf settlement has been determined by Lelieveld (2012) [1] and is transformed into a colour-coded map of the Netherlands. The colour-coding is the main determinant of wolf settlement. Human involvement is modelled through the public opinion, which varies according to the size, composition and behaviour of the wolf population.
[1] Lelieveld, G.: Room for wolf comeback in the Netherlands, (2012).
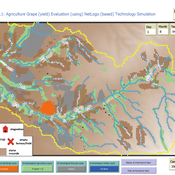
Peer reviewed Agriculture.Grape.yield.Evaluation.using.NetLogo.based.Technology.Simulation (AGENTS): A NetLogo agent-based model developed to assess viticulture efficiency in Byzantine Shivta.
Barak Garty Gil Gambash Guy BarOz Sharona T Levy | Published Friday, December 06, 2024AGENTS model is an agent-based computational framework designed to explore the socio-ecological and economic dynamics of agricultural production in the Byzantine Negev Highlands, with a focus on viticulture. It integrates historical, environmental, and social factors to simulate settlement sustainability, crop yields, and the impacts of varying climate conditions. The model is built in NetLogo and incorporates GIS-based topographical and hydrological data. Key features include the ability to assess climate impacts on crop profitability and settlement strategies, evaluate economic outputs of ancient vineyards, and simulate agent decision-making processes under diverse scenarios.
The AGENTS model is highly flexible, enabling users to simulate agricultural regimes with any two crops: one cash crop (a crop grown for profit, e.g., grapevines) and one staple crop (a crop grown for subsistence, e.g., wheat). While the default setup models viticulture and wheat cultivation in the Byzantine Negev Highlands, users can adapt the model to different environmental and socio-ecological contexts worldwide—both past and present.
Users can load external files to customize precipitation, evaporation, topography, and labor costs (measured as man-days per 0.1ha, converted to kg of wheat per model patch size area), and can also edit key parameters related to yield calculations. This includes modifying crop-specific yield formulas, soil and runoff indices, and any factors influencing crop performance. The model inherently simulates cash crops grown in floodplain regions and staple crops cultivated along riverbanks, providing a powerful tool to investigate societal resilience and responses to climate stressors across diverse environments.
…
Multi-agent model of the spread of climate change denial
Kalina Maria Piskorska Martin Takáč | Published Monday, March 03, 2025This NetLogo model simulates the spread of climate change beliefs within a population of individuals. Each believer has an initial belief level, which changes over time due to interactions with other individuals and exposure to media. The aim of the model is to identify possible methods for reducing climate change denial.
The role of dispersal, selection intensity, and extirpation risk in resilience to climate change: a trait-based modeling approach
Jessica Mo P. David Polly | Published Monday, February 07, 2022This NetLogo model simulates trait-based biotic responses to climate change in an environmentally heterogeneous continent in an evolving clade, the species of which are each represented by local populations that disperse and interbreed; they also are subject to selection, genetic drift, and local extirpation. We simulated mammalian herbivores, whose success depends on tooth crown height, vegetation type, precipitation and grit. This model investigates the role of dispersal, selection, extirpation, and other factors contribute to resilience under three climate change scenarios.
Stoplight parrotfish population model
Tyler Pavlowich | Published Monday, April 02, 2018This agent-based model simulates a stoplight parrotfish population in a heavily-fished Caribbean coral reef. The model allows for the simulation of various fishing regulations and observation of population and catch outcomes. It was built using the structure and equations from several previously published models, including the work of Bozec et al. (2016) and Alonzo and Mangel (2004 and 2005). The initial model conditions are parameterized to population and fishing data collected in Buen Hombre, Dominican Republic by Tyler Pavlowich.
Displaying 10 of 131 results for "Daniel G Brown" clear search