Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 233 results for "G M Leighton" clear search
Peer reviewed Avian pest control: Yield outcome due to insectivorous birds, falconry, and integration of nest boxes.
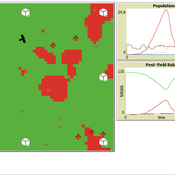
David Jung | Published Monday, November 13, 2023 | Last modified Sunday, November 19, 2023The model aims to simulate predator-prey relationships in an agricultural setting. The focus lies on avian communities and their effect on different pest organisms (here: pest birds, rodents, and arthropod pests). Since most case studies focused on the impact on arthropod pests (AP) alone, this model attempts to include effects on yield outcome. By incorporating three treatments with different factor levels (insectivorous bird species, falconry, nest box density) an experimental setup is given that allows for further statistical analysis to identify an optimal combination of the treatments.
In light of a global decline of birds, insects, and many other groups of organisms, alternative practices of pest management are heavily needed to reduce the input of pesticides. Avian pest control therefore poses an opportunity to bridge the disconnect between humans and nature by realizing ecosystem services and emphasizing sustainable social ecological systems.
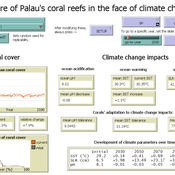
Development of coral reefs under climate change impacts and adaptation options
Nina Preußler | Published Friday, May 30, 2025This NetLogo model simulates how coral reefs around the islands of Palau would develop under different emission scenarios and with selected adaptation strategies. Reef health is indicated by coral cover (%) and is affected by four major climate change impacts: increasing sea surface temperature, sea level rise, ocean acidification, and more intense typhoons. The model differentiates between inner and outer reefs, with the former naturally adapted to warmer, more acidic waters. The simulation includes bleaching events and possible recovery. In addition, the user can choose between different coral transplantation strategies as well as regulate natural thermal adaptation rates.
Modeling information Asymmetries in Tourism
Jacopo A. Baggio Rodolfo Baggio | Published Monday, January 09, 2012 | Last modified Saturday, April 27, 2013A very simple model elaborated to explore what may happens when buyers (travelers) have more information than sellers (tourist destinations)
Comparing agent-based models on experimental data of irrigation games
Marco Janssen Jacopo A. Baggio | Published Tuesday, July 02, 2013 | Last modified Wednesday, July 03, 2013Comparing 7 alternative models of human behavior and assess their performance on a high resolution dataset based on individual behavior performance in laboratory experiments.
Communication and social change in space and time
Sebastian Kluesener Francesco Scalone Martin Dribe | Published Tuesday, May 17, 2016 | Last modified Friday, October 13, 2017This agent-based model simulates the diffusion of a social change process stratified by social class in space and time which is solely driven social and spatial variation in communication links.
Peer reviewed Infectious diseases model for mixed-methods research chapter
Mark Moritz Ian M Hamilton Chelsea E Hunter Daniel C Peart | Published Sunday, January 30, 2022The purpose of this curricular model is to teach students the basics of modeling complex systems using agent-based modeling. It is a simple SIR model that simulates how a disease spreads through a population as its members change from susceptible to infected to recovered and then back to susceptible. The dynamics of the model are such that there are multiple emergent outcomes depending on the parameter settings, initial conditions, and chance.
The curricular model can be used with the chapter Agent-Based Modeling in Mixed Methods Research (Moritz et al. 2022) in the Handbook of Teaching Qualitative & Mixed Methods (Ruth et al. 2022).
The instructional videos can be accessed on YouTube: Video 1 (https://youtu.be/32_JIfBodWs); Video 2 (https://youtu.be/0PK_zVKNcp8); and Video 3 (https://youtu.be/0bT0_mYSAJ8).
Peer reviewed Routes & Rumours 0.1.1
Jakub Bijak Martin Hinsch Oliver Reinhardt | Published Tuesday, July 12, 2022Routes & Rumours is an agent-based model of (forced) human migration. We model the formation of migration routes under the assumption that migrants have limited geographical knowledge concerning the transit area and rely to a large degree on information obtained from other migrants.

Peer reviewed Zimbabwe Agro-Pastoral Management Model (ZAPMM): Musimboti wevanhu, zvipfuo nezvirimwa
MV Eitzel Solera Kleber Tulio Neves Jon Solera Kenneth B Wilson Abraham Mawere Ndlovu Aaron C Fisher André Veski Oluwasola E Omoju Emmanuel Mhike Hove | Published Tuesday, June 19, 2018This model has been created with and for the researcher-farmers of the Muonde Trust (http://www.muonde.org/), a registered Zimbabwean non-governmental organization dedicated to fostering indigenous innovation. Model behaviors and parameters (mashandiro nemisiyano nedzimwe model) derive from a combination of literature review and the collected datasets from Muonde’s long-term (over 30 years) community-based research. The goals of this model are three-fold (muzvikamu zvitatu):
A) To represent three components of a Zimbabwean agro-pastoral system (crops, woodland grazing area, and livestock) along with their key interactions and feedbacks and some of the human management decisions that may affect these components and their interactions.
B) To assess how climate variation (implemented in several different ways) and human management may affect the sustainability of the system as measured by the continued provisioning of crops, livestock, and woodland grazing area.
C) To provide a discussion tool for the community and local leaders to explore different management strategies for the agro-pastoral system (hwaro/nzira yekudyidzana kwavanhu, zvipfuo nezvirimwa), particularly in the face of climate change.
Leviathan group model and its approximation
Thibaut Roubin Guillaume Deffuant | Published Tuesday, July 26, 2022The model is based on the influence function of the Leviathan model (Deffuant, Carletti, Huet 2013 and Huet and Deffuant 2017) with the addition of group idenetity. We aim at better explaining some patterns generated by this model, using a derived mathematical approximation of the evolution of the opinions averaged.
We consider agents having an opinion/esteem about each other and about themselves. During dyadic meetings, agents change their respective opinion about each other, and possibly about other agents they gossip about, with a noisy perception of the opinions of their interlocutor. Highly valued agents are more influential in such encounters. Moreover, each agent belongs to a single group and the opinions within the group are attracted to their average.
We show that a group hierarchy can emerges from this model, and that the inequality of reputations among groups have a negative effect on the opinions about the groups of low status. The mathematical analysis of the opinion dynamic shows that the lower the status of the group, the more detrimental the interactions with the agents of other groups are for the opinions about this group, especially when gossip is activated. However, the interactions between agents of the same group tend to have a positive effect on the opinions about this group.
Agent-Based Model for the Evolution of Ethnocentrism
Max Hartshorn | Published Saturday, March 24, 2012 | Last modified Saturday, April 27, 2013This is an implementation of an agent based model for the evolution of ethnocentrism. While based off a model published by Hammond and Axelrod (2006), the code has been modified to allow for a more fine-grained analysis of evolutionary dynamics.
Displaying 10 of 233 results for "G M Leighton" clear search