Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 814 results NetLogo clear search
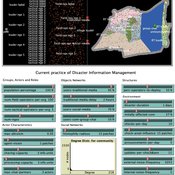
Peer reviewed Share: bottom-up disaster information management
Vittorio Nespeca Tina Comes Frances Brazier | Published Monday, December 05, 2022This model is intended to study the way information is collectively managed (i.e. shared, collected, processed, and stored) in a system and how it performs during a crisis or disaster. Performance is assessed in terms of the system’s ability to provide the information needed to the actors who need it when they need it. There are two main types of actors in the simulation, namely communities and professional responders. Their ability to exchange information is crucial to improve the system’s performance as each of them has direct access to only part of the information they need.
In a nutshell, the following occurs during a simulation. Due to a disaster, a series of randomly occurring disruptive events takes place. The actors in the simulation need to keep track of such events. Specifically, each event generates information needs for the different actors, which increases the information gaps (i.e. the “piles” of unaddressed information needs). In order to reduce the information gaps, the actors need to “discover” the pieces of information they need. The desired behavior or performance of the system is to keep the information gaps as low as possible, which is to address as many information needs as possible as they occur.
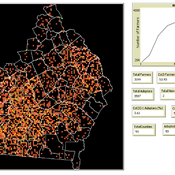
Modelling Farmers’ Adoption Potential to New Bioenergy Crops
Andrew Crooks | Published Tuesday, November 29, 2022A model that representa farmers potential to adopt bio-fuels in Georgia
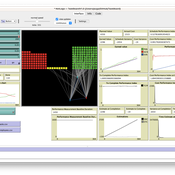
Netlogo Earned Value Management Model
Manuel Castañón-Puga Ricardo Fernando Rosales–Cisneros Julio César Acosta–Prado Alfredo Tirado–Ramos Camilo Khatchikian Elías Aburto–Camacllanqui | Published Thursday, November 24, 2022The model aims to illustrate how Earned Value Management (EVM) provides an approach to measure a project’s performance by comparing its actual progress against the planned one, allowing it to evaluate trends to formulate forecasts. The instance performs a project execution and calculates the EVM performance indexes according to a Performance Measurement Baseline (PMB), which integrates the description of the work to do (scope), the deadlines for its execution (schedule), and the calculation of its costs and the resources required for its implementation (cost).
Specifically, we are addressing the following questions: How does the risk of execution delay or advance impact cost and schedule performance? How do the players’ number or individual work capacity impact cost and schedule estimations to finish? Regardless of why workers cause delays or produce overruns in their assignments, does EVM assess delivery performance and help make objective decisions?
To consider our model realistic enough for its purpose, we use the following patterns: The model addresses classic problems of Project Management (PM). It plays the typical task board where workers are assigned to complete a task backlog in project performance. Workers could delay or advance in the task execution, and we calculate the performance using the PMI-recommended Earned Value.
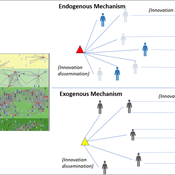
Peer reviewed Modelling Agricultural Innovations as a Social-Ecological Phenomenon
Maja Schlüter Udita Sanga | Published Thursday, November 17, 2022The goal of the AG-Innovation agent-based model is to explore and compare the effects of two alternative mechanisms of innovation development and diffusion (exogenous, linear and endogenous, non-linear) on emergent properties of food and income distribution and adoption rates of different innovations. The model also assesses the range of conditions under which these two alternative mechanisms would be effective in improving food security and income inequality outcomes. Our modelling questions were: i) How do cross-scalar social-ecological interactions within agricultural innovation systems affect system outcomes of food security and income inequality? ii) Do foreign aid-driven exogenous innovation perpetuate income inequality and food insecurity and if so, under which conditions? iii) Do community-driven endogenous innovations improve food security and income inequality and if so, under which conditions? The Ag-Innovation model is intended to serve as a thinking tool for for the development and testing of hypotheses, generating an understanding of the behavior of agricultural innovation systems, and identifying conditions under which alternated innovation mechanisms would improve food security and income inequality outcomes.
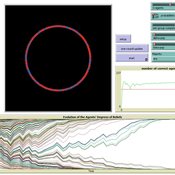
Myside Bias and Group Discussion
Edoardo Baccini | Published Monday, November 14, 2022 | Last modified Tuesday, September 05, 2023The my-side bias is a well-documented cognitive bias in the evaluation of arguments, in which reasoners in a discussion tend to overvalue arguments that confirm their prior beliefs, while undervaluing arguments that attack their prior beliefs. This agent-based model in Netlogo simulates a group discussion among myside-biased agents, within a Bayesian setting. This model is designed to investigate the effects of the myside bias on the ability of groups to reach a consensus or collectively track the correct answer to a given binary issue.
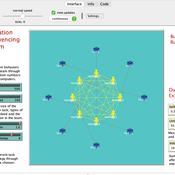
Peer reviewed A Computational Simulation for Task Allocation Influencing Performance in the Team System
Shaoni Wang | Published Friday, November 11, 2022 | Last modified Thursday, April 06, 2023This model system aims to simulate the whole process of task allocation, task execution and evaluation in the team system through a feasible method. On the basis of Complex Adaptive Systems (CAS) theory and Agent-based Modelling (ABM) technologies and tools, this simulation system attempts to abstract real-world teams into MAS models. The author designs various task allocation strategies according to different perspectives, and the interaction among members is concerned during the task-performing process. Additionally, knowledge can be acquired by such an interaction process if members encounter tasks they cannot handle directly. An artificial computational team is constructed through ABM in this simulation system, to replace real teams and carry out computational experiments. In all, this model system has great potential for studying team dynamics, and model explorers are encouraged to expand on this to develop richer models for research.
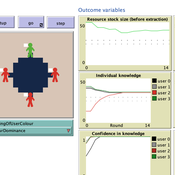
The purpose of the study is to unpack and explore a potentially beneficial role of sharing metacognitive information within a group when making repeated decisions about common pool resource (CPR) use.
We explore the explanatory power of sharing metacognition by varying (a) the individual errors in judgement (myside-bias); (b) the ways of reaching a collective judgement (metacognition-dependent), (c) individual knowledge updating (metacognition- dependent) and d) the decision making context.
The model (AgentEx-Meta) represents an extension to an existing and validated model reflecting behavioural CPR laboratory experiments (Schill, Lindahl & Crépin, 2015; Lindahl, Crépin & Schill, 2016). AgentEx-Meta allows us to systematically vary the extent to which metacognitive information is available to agents, and to explore the boundary conditions of group benefits of metacognitive information.
Perspectives on the Information-Based Economy
Vladimir Gazda Jana Zausinova Marcel Volosin | Published Monday, October 24, 2022This is the agent-based model of information market evolution. It simulates the influences of the transition from material to electronic carriers of information, which is modelled by the falling price of variable production factor. It demonstrates that due to zero marginal production costs, the competition increases, the market becomes unstable, and experience various phases of evolution leading to market monopolization.
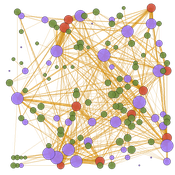
Peer reviewed TRANSOPE: a multi-agent model to simulate outsourcing networks in road freight transport.
Aitor Salas-Peña Blanca Rosa Cases Gutiérrez | Published Friday, October 21, 2022A road freight transport (RFT) operation involves the participation of several types of companies in its execution. The TRANSOPE model simulates the subcontracting process between 3 types of companies: Freight Forwarders (FF), Transport Companies (TC) and self-employed carriers (CA). These companies (agents) form transport outsourcing chains (TOCs) by making decisions based on supplier selection criteria and transaction acceptance criteria. Through their participation in TOCs, companies are able to learn and exchange information, so that knowledge becomes another important factor in new collaborations. The model can replicate multiple subcontracting situations at a local and regional geographic level.
The succession of n operations over d days provides two types of results: 1) Social Complex Networks, and 2) Spatial knowledge accumulation environments. The combination of these results is used to identify the emergence of new logistics clusters. The types of actors involved as well as the variables and parameters used have their justification in a survey of transport experts and in the existing literature on the subject.
As a result of a preferential selection process, the distribution of activity among agents shows to be highly uneven. The cumulative network resulting from the self-organisation of the system suggests a structure similar to scale-free networks (Albert & Barabási, 2001). In this sense, new agents join the network according to the needs of the market. Similarly, the network of preferential relationships persists over time. Here, knowledge transfer plays a key role in the assignment of central connector roles, whose participation in the outsourcing network is even more decisive in situations of scarcity of transport contracts.

Household Energy Retrofit Behavior (HERB) ABM
Lars Even Egner | Published Thursday, October 20, 2022The HERB model simulates the retrofit behavior of homeowners in a neighborhood. The model initially parameterizes a neighborhood and households with technical factors such as energy standard, the availability of subsidies, and neighbors’ retrofit activity. Then, these factors are translated into psychological variables such as perceived comfort gain, worry about affording the retrofit, and perceiving the current energy standard of the home as wasteful. These psychological variables moderate the transition between four different stages of deciding to retrofit, as suggested by a behavioral model specific to household energy retrofitting identified based on a large population survey in Norway. The transition between all stages eventually leads to retrofitting, which affects both the household’s technical factors and friends and neighbors, bringing the model “full circle”. The model assumes that the energy standard of the buildings deteriorates over time, forcing households to retrofit regularly to maintain a certain energy standard.
Because experiment datafiles are about 15GB, they are available at https://doi.org/10.18710/XOSAMD
Displaying 10 of 814 results NetLogo clear search