Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 189 results for "Ed Manley" clear search
TunaFisher ABM
Guus Ten Broeke | Published Wednesday, January 13, 2021TunaFisher ABM simulates the decisions of fishing companies and fishing vessels of the Philippine tuna purse seinery operating in the Celebes and Sulu Seas.
High fishing effort remains in many of the world’s fisheries, including the Philippine tuna purse seinery, despite a variety of policies that have been implemented to reduce it. These policies have predominantly focused on models of cause and effect which ignore the possibility that the intended outcomes are altered by social behavior of autonomous agents at lower scales.
This model is a spatially explicit Agent-based Model (ABM) for the Philippine tuna purse seine fishery, specifically designed to include social behavior and to study its effects on fishing effort, fish stock and industry profit. The model includes economic and social factors of decision making by companies and fishing vessels that have been informed by interviews.
…
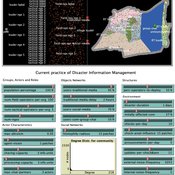
Peer reviewed Share: bottom-up disaster information management
Vittorio Nespeca Tina Comes Frances Brazier | Published Monday, December 05, 2022This model is intended to study the way information is collectively managed (i.e. shared, collected, processed, and stored) in a system and how it performs during a crisis or disaster. Performance is assessed in terms of the system’s ability to provide the information needed to the actors who need it when they need it. There are two main types of actors in the simulation, namely communities and professional responders. Their ability to exchange information is crucial to improve the system’s performance as each of them has direct access to only part of the information they need.
In a nutshell, the following occurs during a simulation. Due to a disaster, a series of randomly occurring disruptive events takes place. The actors in the simulation need to keep track of such events. Specifically, each event generates information needs for the different actors, which increases the information gaps (i.e. the “piles” of unaddressed information needs). In order to reduce the information gaps, the actors need to “discover” the pieces of information they need. The desired behavior or performance of the system is to keep the information gaps as low as possible, which is to address as many information needs as possible as they occur.
Correlated random walk
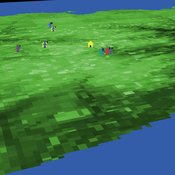
Thibault Fronville | Published Friday, April 01, 2022 | Last modified Monday, April 25, 2022The first simple movement models used unbiased and uncorrelated random walks (RW). In such models of movement, the direction of the movement is totally independent of the previous movement direction. In other words, at each time step the direction, in which an individual is moving is completely random. This process is referred to as a Brownian motion.
On the other hand, in correlated random walks (CRW) the choice of the movement directions depends on the direction of the previous movement. At each time step, the movement direction has a tendency to point in the same direction as the previous one. This movement model fits well observational movement data for many animal species.
The presented agent based model simulated the movement of the agents as a correlated random walk (CRW). The turning angle at each time step follows the Von Mises distribution with a ϰ of 10. The closer ϰ gets to zero, the closer the Von Mises distribution becomes uniform. The larger ϰ gets, the more the Von Mises distribution approaches a normal distribution concentrated around the mean (0°).
This model is implemented in python and can be used as a building block for more complex agent based models that would rely on describing the movement of individuals with CRW.

An age and/or gender-based division of labor during the Last Glacial Maximum in Iberia through rabbit hunting
Liliana Perez Samuel Seuru Ariane Burke | Published Friday, July 07, 2023Many archaeological assemblages from the Iberian Peninsula dated to the Last Glacial Maximum contain large quantities of European rabbit (Oryctolagus cuniculus) remains with an anthropic origin. Ethnographic and historic studies report that rabbits may be mass-collected through warren-based harvesting involving the collaborative participation of several persons.
We propose and implement an Agent-Based Model grounded in the Optimal Foraging Theory and the Diet Breadth Model to examine how different warren-based hunting strategies influence the resulting human diets.
Particularly, this model is developed to test the following hypothesis: What if an age and/or gender-based division of labor was adopted, in which adult men focus on large prey hunting, and women, elders and children exploit warrens?
…
An age and/or gender-based division of labor during the Last Glacial Maximum in Iberia through rabbit hunting
Liliana Perez Samuel Seuru Ariane Burke | Published Thursday, February 29, 2024Many archaeological assemblages from the Iberian Peninsula dated to the Last Glacial Maximum contain large quantities of European rabbit (Oryctolagus cuniculus) remains with an anthropic origin. Ethnographic and historic studies report that rabbits may be mass-collected through warren-based harvesting involving the collaborative participation of several persons.
We propose and implement an Agent-Based Model grounded in the Optimal Foraging Theory and the Diet Breadth Model to examine how different warren-based hunting strategies influence the resulting human diets.
…
SONG - Simulation of Network Growth
D Levinson | Published Monday, August 29, 2011 | Last modified Saturday, April 27, 2013SONG is a simulator designed for simulating the process of transportation network growth.
Walk Away in groups
Athena Aktipis | Published Thursday, March 17, 2016This NetLogo model implements the Walk Away strategy in a spatial public goods game, where individuals have the ability to leave groups with insufficient levels of cooperation.
Central-place forager mobility and cultural diversity
Luke Premo | Published Wednesday, May 18, 2016This spatially explicit agent-based model addresses how effective foraging radius (r_e) affects the effective size–and thus the equilibrium cultural diversity–of a structured population composed of central-place foraging groups.
Agent-Based Simulation for International Tax Compliance
Peter Gerbrands | Published Tuesday, July 18, 2023Country-by-Country Reporting and Automatic Exchange of Information have recently been implemented in European Union (EU) countries. These international tax reforms increase tax compliance in the short term. In the long run, however, taxpayers will continue looking abroad to avoid taxation and, countries, looking for additional revenues, will provide opportunities. As a result, tax competition intensifies and the initial increase in compliance could reverse. To avoid international tax reforms being counteracted by tax competition, this paper suggests bilateral responsive regulation to maximize compliance. This implies that countries would use different tax policy instruments toward other countries, including tax and secrecy havens.
To assess the effectiveness of fully or partially enforce tax policies, this agent based model has been ran many times under different enforcement rules, which influence the perceived enforced- and voluntary compliance, as the slippery-slope model prescribes. Based on the dynamics of this perception and the extent to which agents influence each other, the annual amounts of tax evasion, tax avoidance and taxes paid are calculated over longer periods of time.
The agent-based simulation finds that a differentiated policy response could increase tax compliance by 6.54 percent, which translates into an annual increase of €105 billion in EU tax revenues on income, profits, and capital gains. Corporate income tax revenues in France, Spain, and the UK alone would already account for €35 billion.
Income and Expenditure
Tony Lawson | Published Thursday, October 06, 2011 | Last modified Saturday, April 27, 2013How do households alter their spending patterns when they experience changes in income? This model answers this question using a random assignment scheme where spending patterns are copied from a household in the new income bracket.
Displaying 10 of 189 results for "Ed Manley" clear search