DogPopDy: ABM for ABC planning (1.0.0)
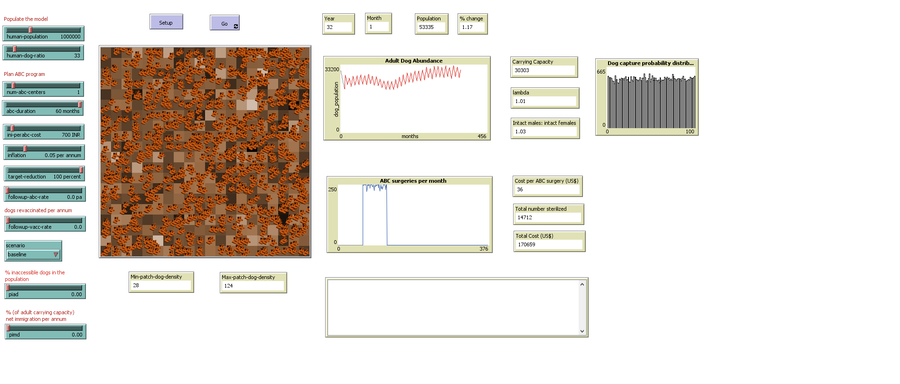
An agent-based model designed as a tool to assess and plan free-ranging dog population management programs that implement Animal Birth Control (ABC). The time, effort, financial resources and conditions needed to successfully control dog populations and achieve rabies control can be determined by performing virtual experiments using DogPopDy.
Release Notes
We have developed a customizable agent-based model (DogPopDy) that can incorporate real-world processes like density-dependent survival, capture heterogeneity and immigration. The model simulation tool allows for relatively easy manipulation of all key parameter settings to test for capacity to effectively reduce populations within a reasonable period of time.
Associated Publications
Belsare, A., Vanak, A.T. Modelling the challenges of managing free-ranging dog populations. Sci Rep 10, 18874 (2020). https://doi.org/10.1038/s41598-020-75828-6
DogPopDy: ABM for ABC planning 1.0.0
An agent-based model designed as a tool to assess and plan free-ranging dog population management programs that implement Animal Birth Control (ABC). The time, effort, financial resources and conditions needed to successfully control dog populations and achieve rabies control can be determined by performing virtual experiments using DogPopDy.
Release Notes
We have developed a customizable agent-based model (DogPopDy) that can incorporate real-world processes like density-dependent survival, capture heterogeneity and immigration. The model simulation tool allows for relatively easy manipulation of all key parameter settings to test for capacity to effectively reduce populations within a reasonable period of time.